02-Hybrid_vision_toolkit
📋简介
Hybrid_vision_toolkit 是 ShiMetaPi 推出的专为事件相机(DVS)设计的高性能C++ SDK,支持事件数据流(EVS)和图像数据流(APS)的实时采集与处理,兼容第三方事件格式。例如:EventCD,适用于高性能事件相机开发。
📋 技术规格
事件相机参数
- EVS分辨率:768×608(子采样:384×304)
- APS分辨率:768×608(可调)
- 数据传输:USB 3.0高速传输
- 事件格式:兼容EventCD/EVT2.0 等
系统要求
- C++标准:C++17 或更高版本
- CMake:3.10 或更高版本
- 操作系统:Ubuntu 22.04
🔧 依赖说明
- OpenCV:图像处理与可视化(
libopencv-dev) - libusb-1.0:USB设备通信(
libusb-1.0-0-dev) - Hybrid Visoin SDK: ShimetaPi API
- Openeb:第三方依赖库(可选)
🚀 快速开始
构建基于HV项目
# Ubuntu/Debian
sudo apt-get update
sudo apt-get install build-essential cmake libusb-1.0-0-dev libopencv-dev
# 给脚本添加执行权限
chmod +x install_libs.sh
# 安装到默认位置 (/usr/local)
./install_libs.sh
# 或者安装到指定位置
./install_libs.sh /path/to/install1.hv_toolkit_get_started
# 进入示例程序目录
cd sample/hv_toolkit_get_started
# 构建示例程序
mkdir build && cd build
cmake ..
make
# 运行示例程序
./hv_toolkit_get_started程序运行截图 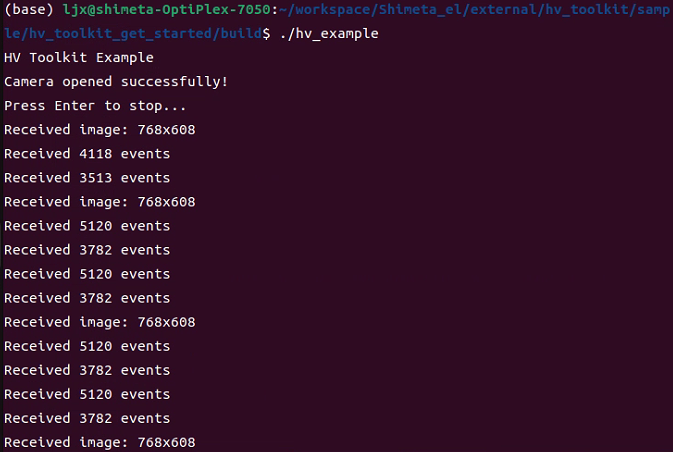
2.hv_camera_record
# 进入示例程序目录
cd sample/hv_camera_record
# 构建示例程序
mkdir build && cd build
cmake..
make
# 运行示例程序
./hv_camera_record events.raw video.avi 5程序运行截图 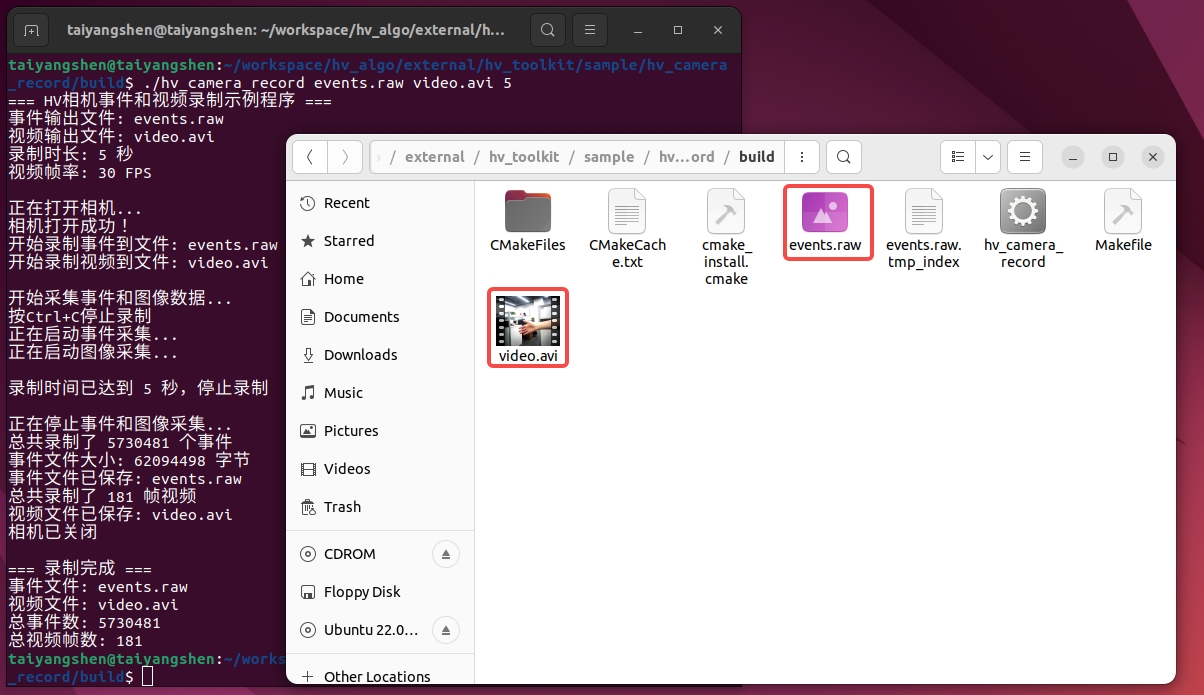
3. hv_toolkit_viewer
# 进入示例程序目录
cd sample/hv_toolkit_viewer
# 构建示例程序
mkdir build && cd build
cmake..
make
# 运行示例程序
./hv_toolkit_viewer ../../hv_camera_record/build/events.raw程序运行截图 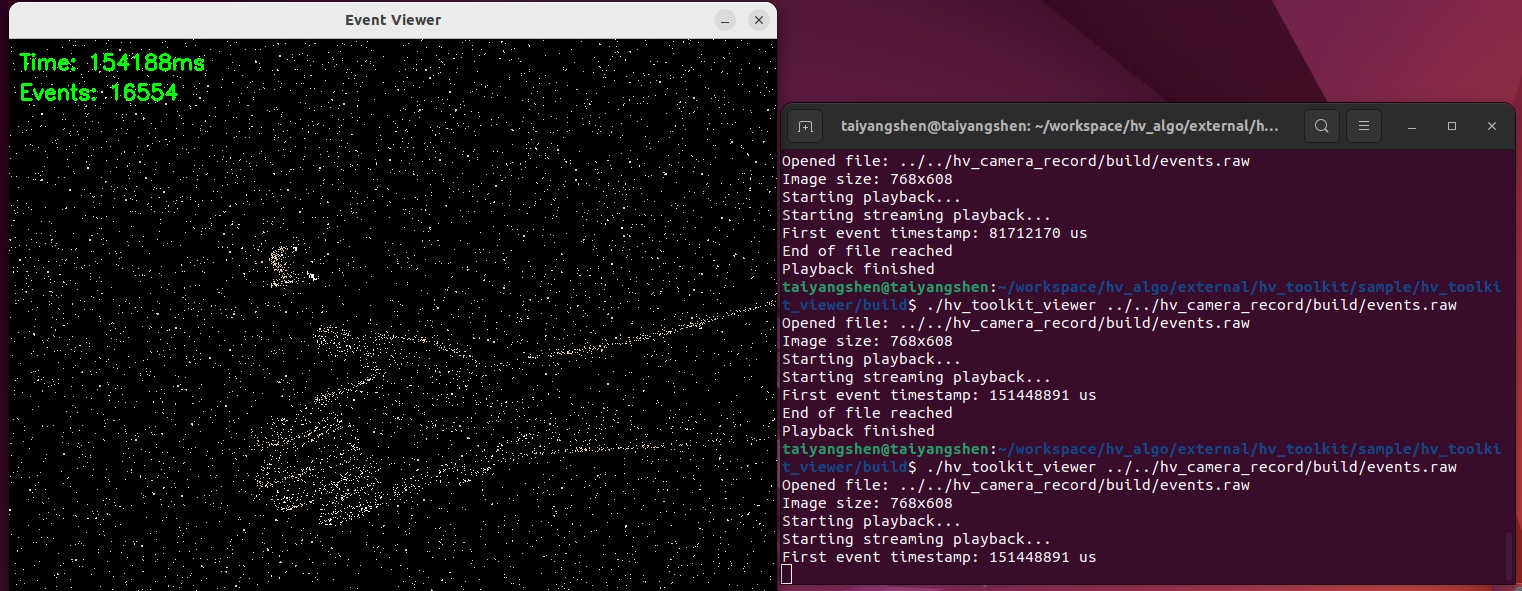
构建基于Openeb项目
1. metavision_sdk_test
# 安装openeb SDK
curl -L https://propheseeai.jfrog.io/artifactory/api/security/keypair/prophesee-gpg/public >/tmp/propheseeai.jfrog.op.asc
sudo cp /tmp/propheseeai.jfrog.op.asc /etc/apt/trusted.gpg.d
sudo add-apt-repository 'https://propheseeai.jfrog.io/artifactory/openeb-debian/'
sudo apt update
sudo apt -y install metavision-openeb# 使用openeb打开相机需要先安装我们的相机插件
# 我们已经将相机插件编译成lib,使用如下命令复制到metavision的相机搜索路径下
sudo cp ./lib/libhal_camera_hal.so /usr/local/lib/metavision/hal/plugins/
# 进入示例程序目录
cd sample/metavision_sdk_test
# 构建示例程序
mkdir build && cd build
cmake..
make
# 运行示例程序
./metavision_sdk_test程序运行截图 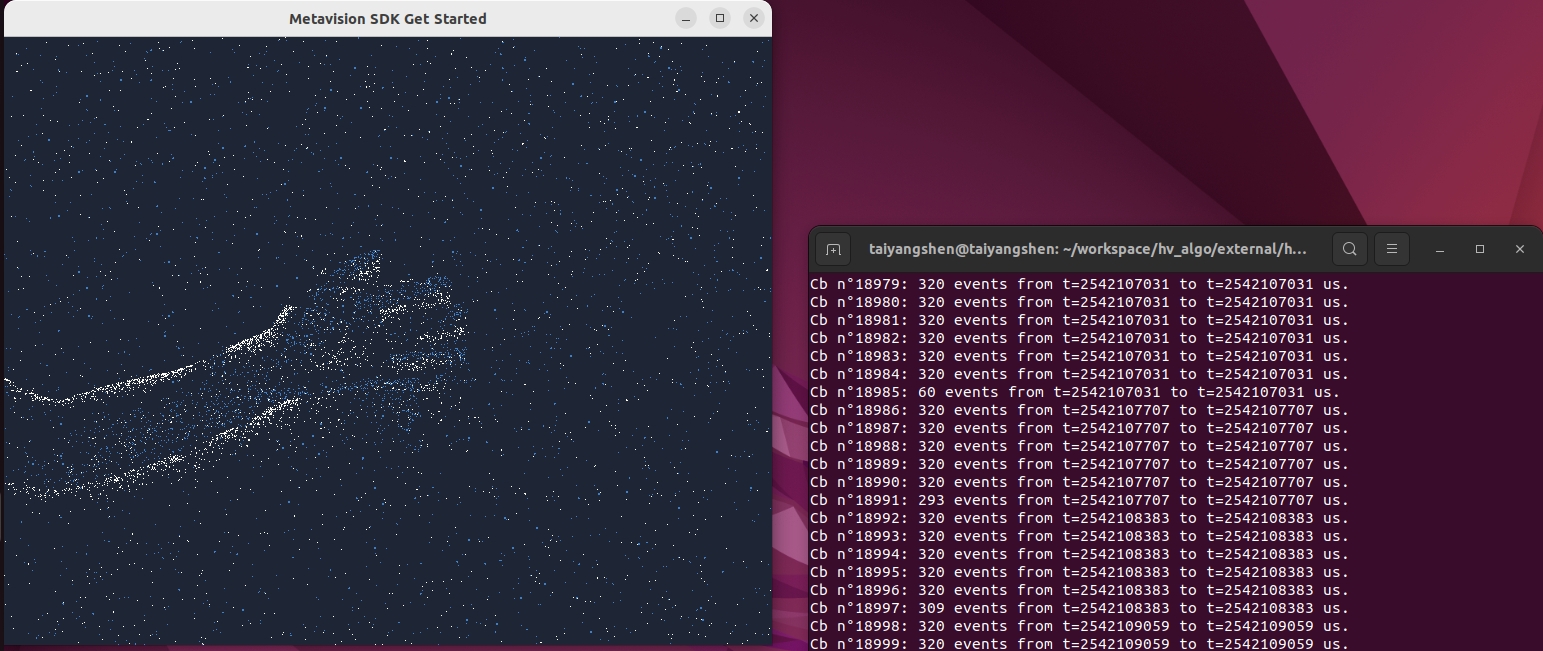
2. hv_camera_metavision_sample
# 进入示例程序目录
cd sample/hv_camera_metavision_sample
# 构建示例程序
mkdir build && cd build
cmake..
make
# 运行示例程序
./hv_camera_metavision_sample程序运行截图 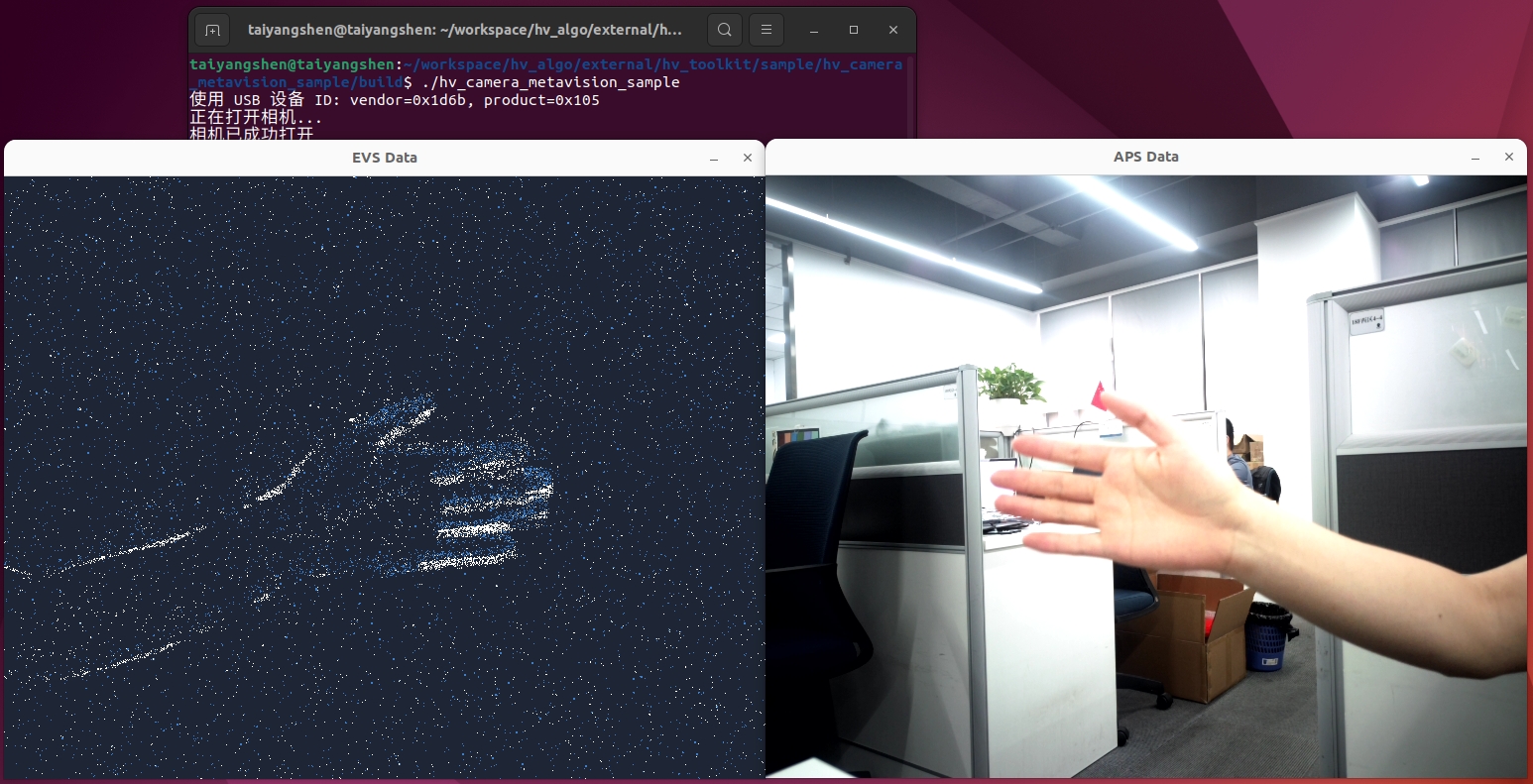
🚨 故障排除
常见问题
问题1: 无法找到USB设备&&LIBUSB_EERROR_ACCESS 如果出现报错no match devices found说明设备未成功连接  请检查USB设备是否连接以及vendor_id和product_id是否正确
请检查USB设备是否连接以及vendor_id和product_id是否正确 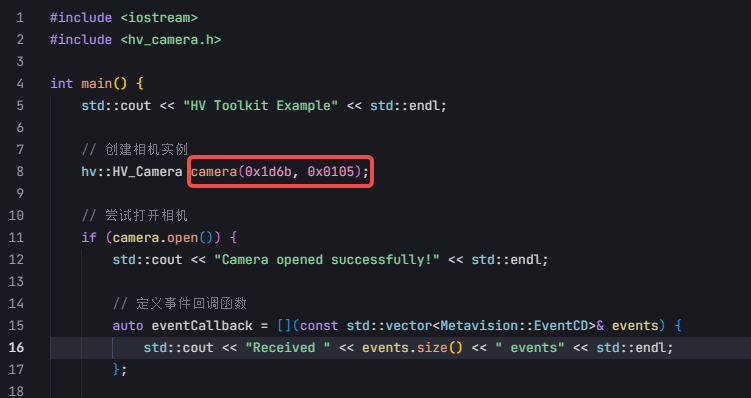 配置正确,且将设备连接到主机后,运行程序出现Cannot open device:LIBUSB_EERROR_ACCESS这是由于未赋予权限导致的,执行下述指令即可
配置正确,且将设备连接到主机后,运行程序出现Cannot open device:LIBUSB_EERROR_ACCESS这是由于未赋予权限导致的,执行下述指令即可
sudo chmod -R 777 /dev/bus/usb/📁 项目结构
hv_toolkit/
├── CMakeLists.txt # 主构建配置
├── README.md # 项目文档(中文)
├── README_EN.md # 项目文档(英文)
├── API.md # API详细文档
├── include/ # 头文件目录
│ ├── hv_camera.h # 相机类头文件
│ ├── hv_event_reader.h # 事件读取类头文件
│ ├── hv_event_writer.h # 事件写入类头文件
│ ├── hv_events_format.h # 事件格式定义
│ ├── hv_evt2_codec.h # EVT2编解码器
│ └── hv_usb_device.h # USB设备类头文件
├── lib/ # 编译后的库文件
│ └── libhv_camera.so # 动态链接库
├── sample/ # 示例程序
│ ├── hv_camera_metavision_sample/ # Metavision集成示例
│ ├── hv_camera_record/ # 事件录制示例
│ ├── hv_toolkit_get_started/ # 入门示例
│ ├── hv_toolkit_viewer/ # 事件可视化播放器
│ └── metavision_sdk_test/ # Metavision SDK测试
└── assets/ # 资源文件🔍 示例程序说明
hv_camera_metavision_sample
集成HV Toolkit与Metavision SDK,演示事件流与图像流的同步采集与处理。该示例展示了如何将HV相机与Metavision算法库结合使用,实现高效的事件数据处理。
hv_camera_record
演示如何采集并录制事件数据到本地raw文件。该示例包含完整的事件数据采集流程,支持实时录制和数据保存功能。
hv_toolkit_get_started
基础入门示例,展示如何初始化相机、采集事件和图像数据。这是学习HV Toolkit的最佳起点,包含了基本的API使用方法和数据处理流程。
hv_toolkit_viewer
事件数据可视化播放器,支持raw文件的读取、暂停、回放和帧生成显示。提供直观的事件数据可视化界面,便于数据分析和调试。
metavision_sdk_test
Metavision SDK相关功能测试与演示。该示例展示了如何使用Metavision SDK的各种算法和功能,包括事件处理、特征检测等。
🙏 致谢
感谢以下开源项目对本项目的支持:
- Prophesee Metavision SDK - 事件处理算法
- OpenCV - 计算机视觉库
- libusb - USB设备通信库
🙋 联系我们
如果你在使用 HV Toolkit 过程中遇到任何问题或有任何建议,欢迎通过以下方式与我们联系: 开源硬件网站: https://www.shimetapi.cn (国内) https://www.shimetapi.com (海外) 在线技术文档:https://forum.shimetapi.cn/wiki/zh/ 在线技术社区:https://forum.shimetapi.cn HV Toolkit - 让事件相机开发更简单 🚀