二、硬件准备与环境配置
1 硬件准备
1.1 所需硬件清单
在开始之前,请确保准备好以下硬件:
| 硬件 | 说明 | 必需 |
|---|---|---|
| RDK X5 开发板 | 运行示例程序的主板 | ✓ |
| EVS 事件相机模块 | 连接到 RDK X5 | ✓ |
| 电源适配器 | 5V/3A 或更高功率 | ✓ |
| SD 卡 | 建议 32GB 及以上,Class 10 | ✓ |
| HDMI 显示器 | 用于查看实时画面 | 推荐 |
| HDMI 线 | 连接开发板和显示器 | 推荐 |
| 网线/WiFi | 用于远程访问(可选) | 可选 |
| USB 键盘 | 本地操作(可选) | 可选 |
1.2 硬件连接步骤
步骤 1:安装 SD 卡
确保 SD 卡已烧录系统镜像
镜像版本
使用的镜像为:shimetapi_rdk_x5_3.4.1_0609.img
MD5值:81c545e85b9ba9c414657d52d9bed711将 SD 卡插入 RDK X5 的 SD 卡槽
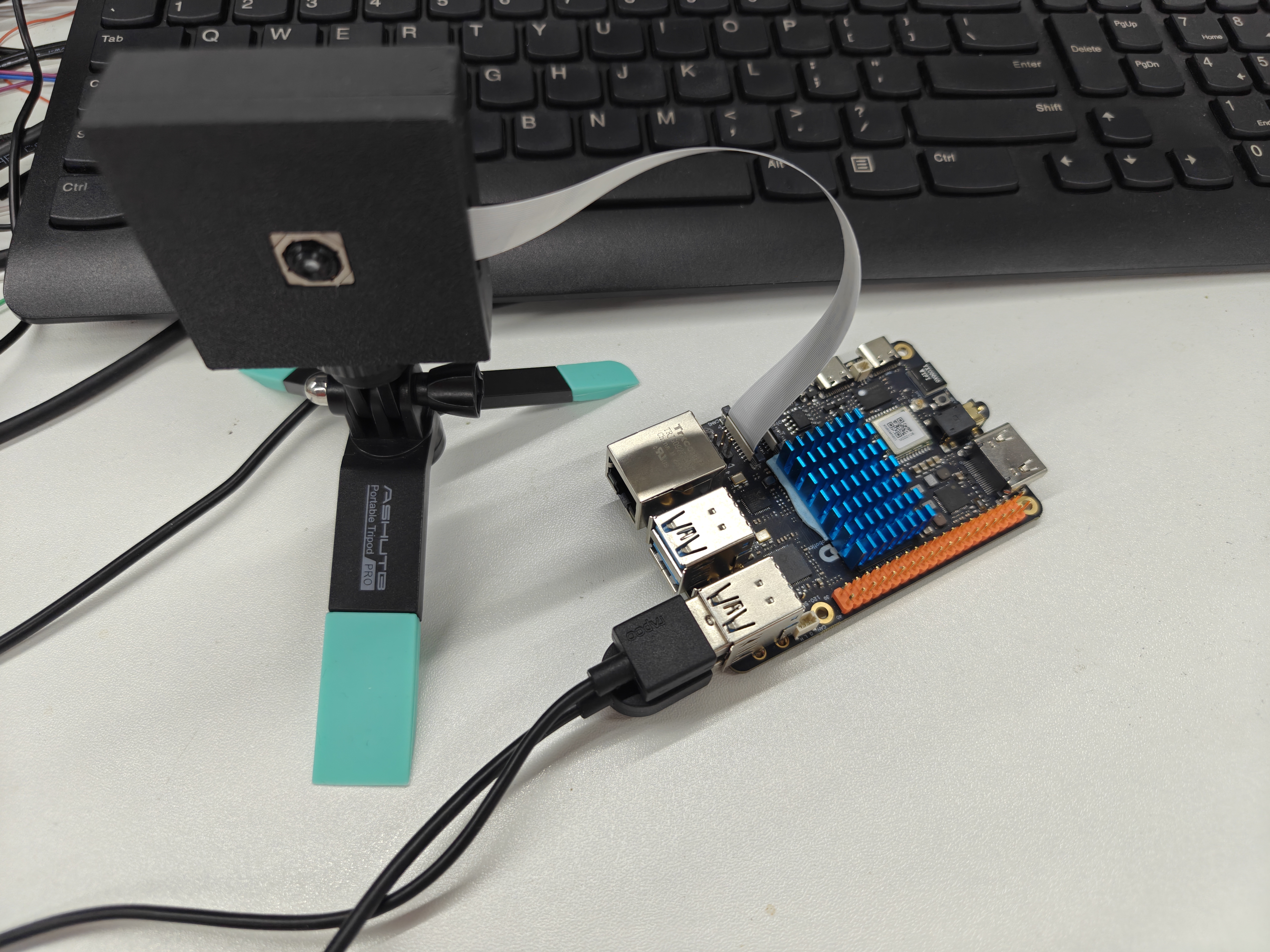
步骤 2:连接 EVS 相机
- 找到 RDK X5 上的 MIPI CSI 接口,默认接在 CAM1 接口上(靠近网口)
- 轻轻打开接口卡扣
- 将 EVS 相机排线插入
- 按下卡扣固定排线
步骤 3:连接显示器
- 使用 HDMI 线连接 RDK X5 和显示器
步骤 4:接通电源
- 连接电源适配器
- 观察开发板指示灯(应该开始闪烁)
2 环境配置
参考文档
RDK官方指导:https://developer.d-robotics.cc/rdk_doc/RDK
2.1 系统登录
2.1.1 HDMI桌面系统
插入电源,HDMI,等待系统初始化,初始化完成即可显示桌面系统

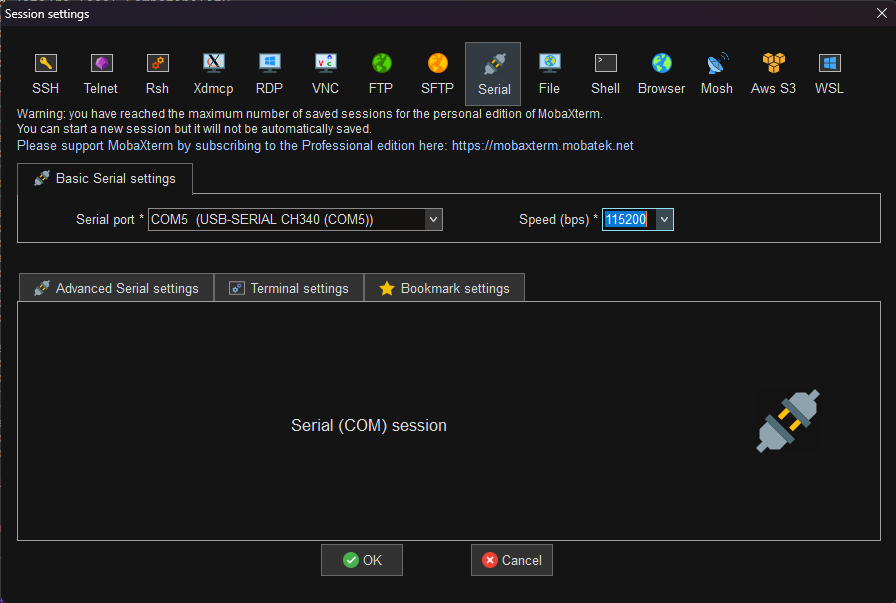
2.1.2 串口登录
选择串口登录需要确保安装了串口驱动CH340。 插入串口,设备管理器会有端口显示。

打开 MobaXterm 工具,点击 Session,然后选择 Serial,X5的串口波特率是115200
再插入电源上电,此时在 MobaXterm 的串口终端里会打印日志,最后会有个系统登录 用户:sunrise 密码:sunrise 用户:root 密码:root (管理员权限)

2.2 MobaXterm SSH 连接
连接 WIFI 可以直接用 ifconfig 指令获取当前设备 IP
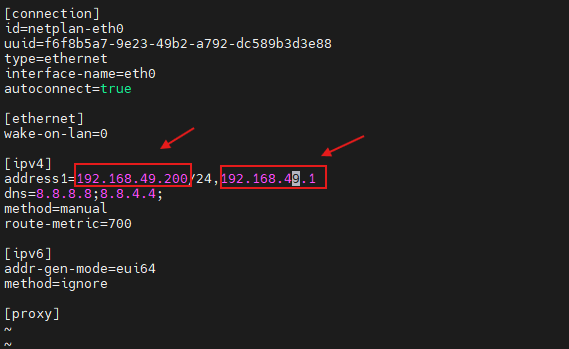
连接以太网的需要输入下面的指令
sudo vi /etc/NetworkManager/system-connections/netplan-eth0.nmconnection这里以串口终端显示为例,需要修改这个文件里面的 IP 地址和网关,需要和你连接的网线一样的 IP 网段
然后就可以打开 MobaXterm 工具,点击 SSH,填写 IP 地址和用户(这里的用户推荐直接使用 root)
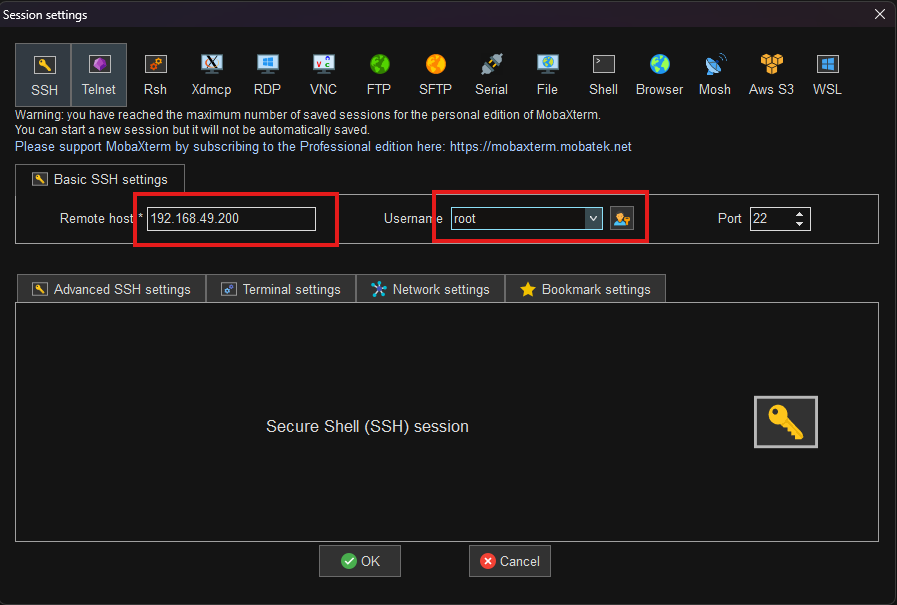
点击 OK 后再输入密码就可以进入终端了