C-K1BA Introduction
Chapter 1 Product Overview
The C-K1BA V1.0 core board uses the RISC-V SpacemiT X60 octa-core processor, equipped with the Harmony system, with a main frequency of up to 1.6GHz, super performance, and rich interfaces. It uses IMG BXE-2-32@819MHz GPU, 32KB SLC, supports 4K, H.265/H.264 hardware decoding, and is first-class in both running points and decoding. It is your new choice for human-computer interaction and industrial control projects.
1.1 Scope of application
C-K1BA V1.0 is a K1 eight-core processor core board based on the iterative space-time RSIC-V architecture. It is widely used in many fields such as smart display terminal products, video terminal products, industrial automation terminal products, etc.
1.2 Product Features
- RSIC-V is an open source architecture that is self-controlled and designed with domestically produced industrial components.
- It uses 4 groups of 80-pin BTB interfaces to bring out all pin functions, making it convenient and flexible to expand the design.
- It integrates PCIe2.0, dual-channel GMAC, SDIO, I2C, PWM, UART, and GPIO interfaces to meet the requirements of various peripherals on the market.
- Supports dual-screen display. HDMI supports a maximum resolution of 1920 1080, and MIPI supports a maximum resolution of 1920 1080.
- It comes with a deep neural network unit (NPU) with a performance of up to 2.0 TOPS, which can meet the needs of deep learning projects.
1.3 Appearance and Interface Diagram
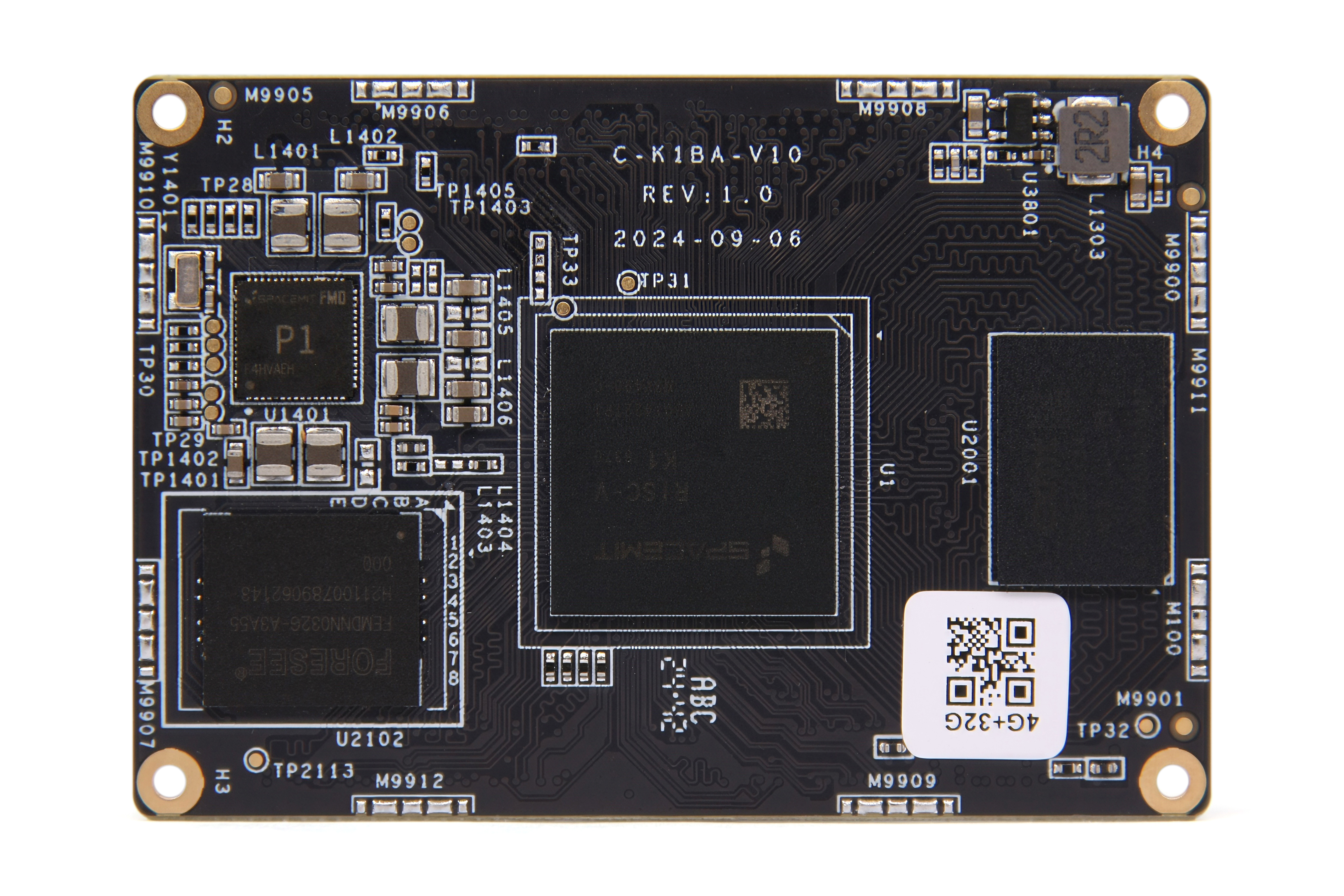
front:
back:
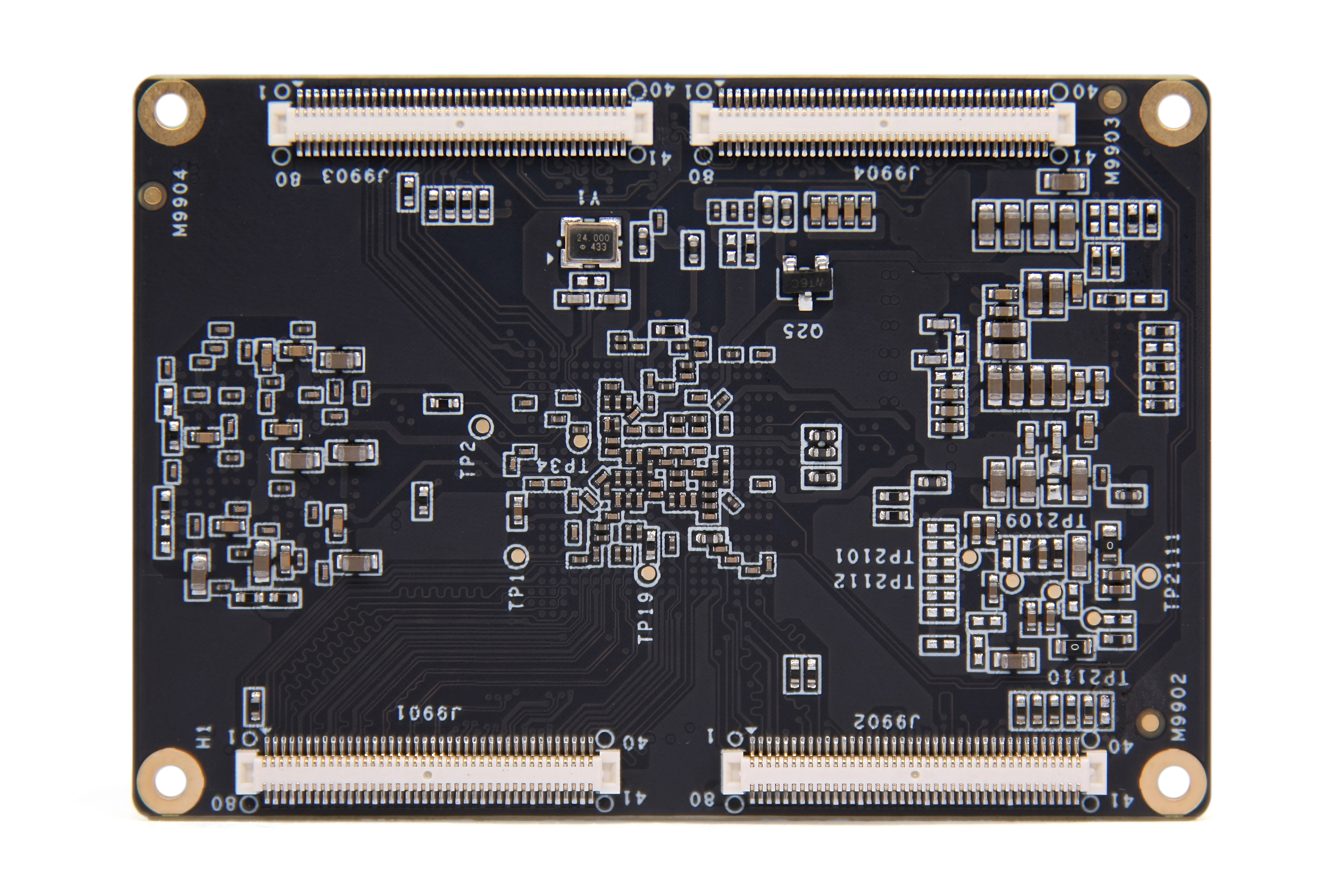
Photo Statement
The above photos were taken from a batch of boards produced by our company. Due to the continuous maintenance of the products, the boards actually shipped may not be consistent with the photos.
Chapter 2 Basic Function List
| Function | Describe |
|---|---|
| Board size | 65*45mm |
| CPU | SpacemiT RSIC-V processor K1, eight cores, maximum frequency 1.6GHz |
| operating system | Harmony OS |
| Memory | Supports 4GB LPDDR4 memory |
| store | Supports 32GB, 64GB and 128GB eMMC storage options |
| show | 1 HDMI, supports up to 1080P@60Hz resolution 1个MIPI,1 MIPI, supports up to 1080P@60Hz resolution |
| Connectivity | 2 built-in Gigabit Ethernet MAC MAC 2 PCIe2.0 X2 lane RC up to 3 UARTs up to 4 I2C up to 2 SPI up to 2 SDIO |
| Board-to-Board Connectors | 80P 0.5mm pitch B2B connector X4 |
| Operating temperature | -10°C to 60°C |
Chapter 3 PCB Size and Interface Layout
3.1 PCB Dimensions
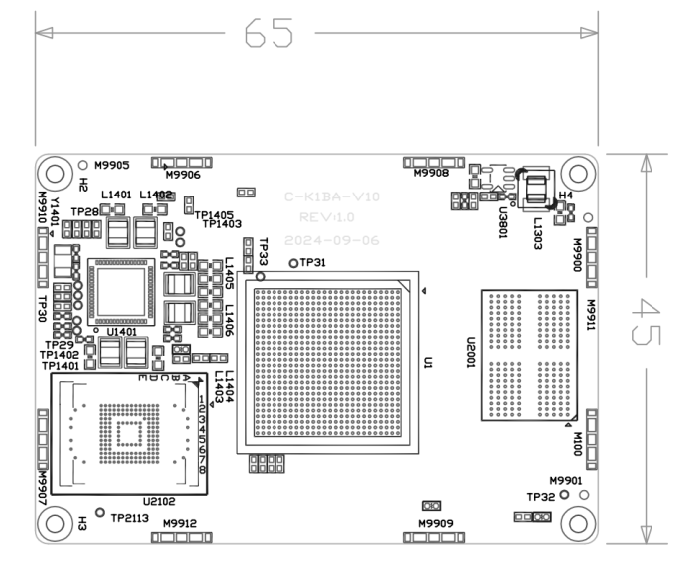
- PCB: 6 layers, thickness 1.6mm
- PCBA: L * W=65mm*45mm,MAX H=7.0(??)+/-0.3mm
- Screw hole specifications: M2 x 4
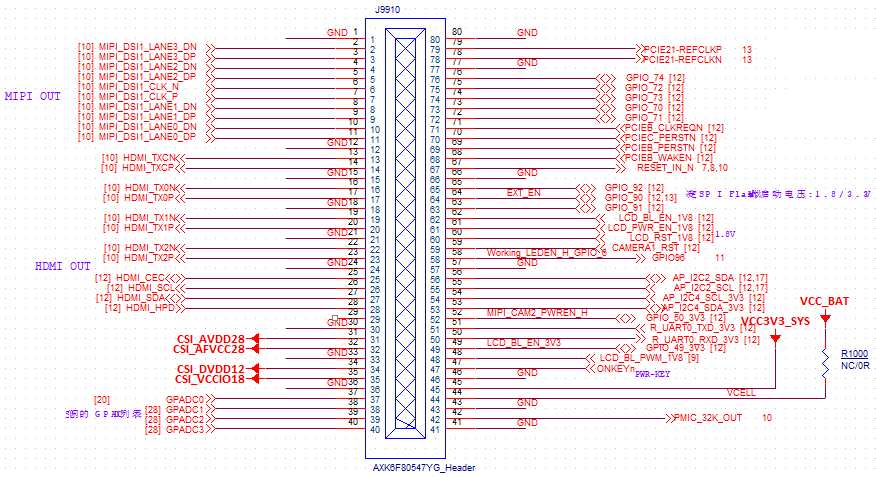
3.2 Interface parameter description
Image annotation: The circle on the socket interface image  indicates the first pin.
indicates the first pin.
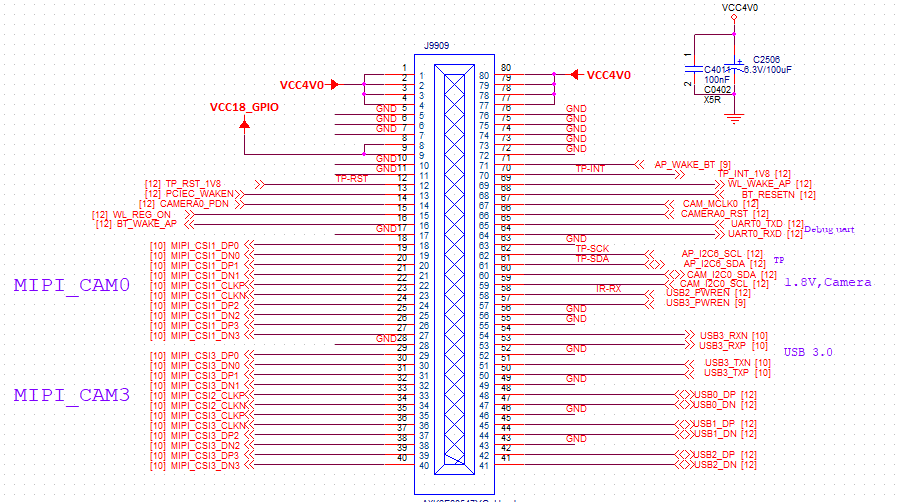
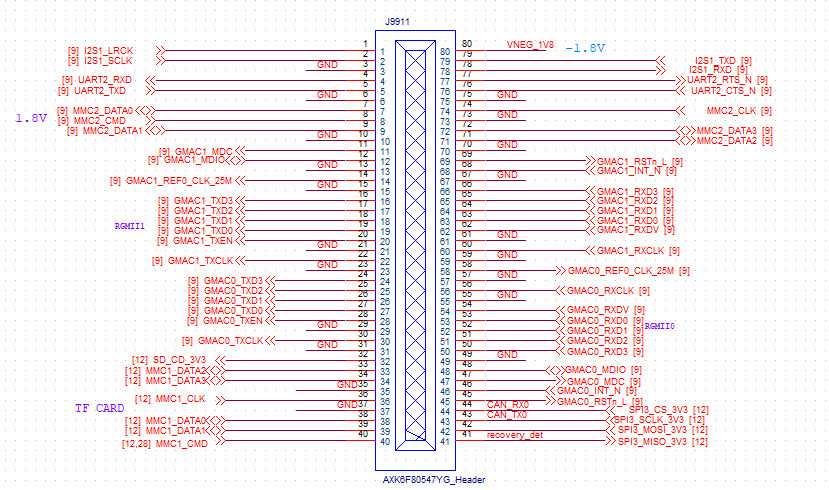
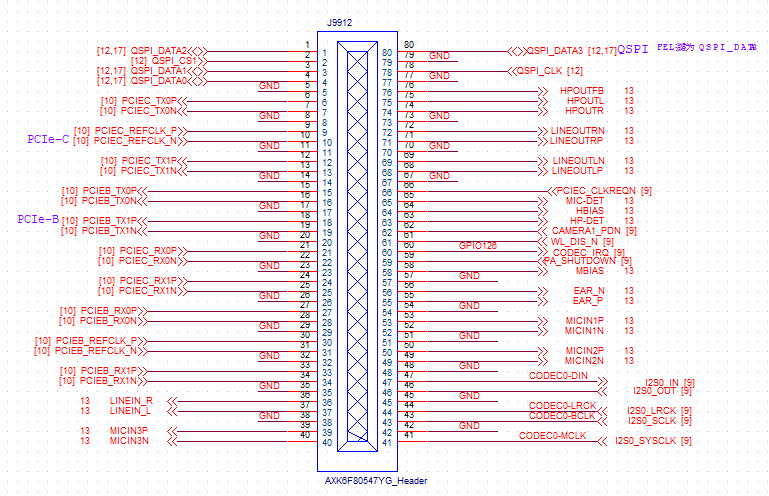
BTB interface (80pin/0.5mmX4)
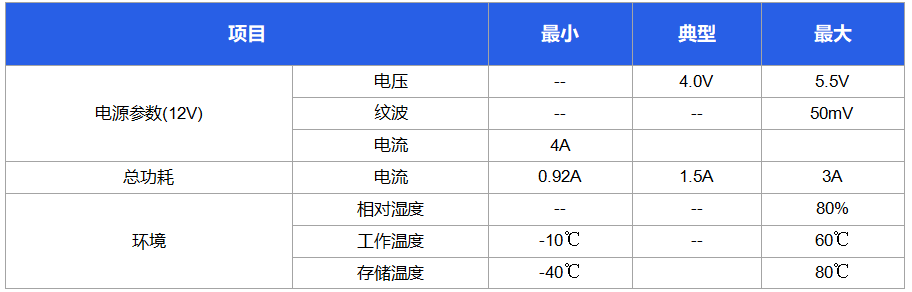
Chapter 4 Electrical Performance
Copyright Notice
This user manual, including but not limited to all the information contained therein, is protected by copyright law. Without the permission of ShiMetaPi, no imitation, copying, excerpting, translating, distributing or other use is allowed.
Disclaimer
The ownership and intellectual property rights of third-party product names or contents mentioned in this user manual belong to the respective product or content owners and are protected by current intellectual property laws and international treaties.