ROS2基础开发
实验01-搭建环境
一、一键配置
打开终端,运行安装命令,执行鱼香ROS配置脚本:
wget http://fishros.com/install -O fishros && . fishros
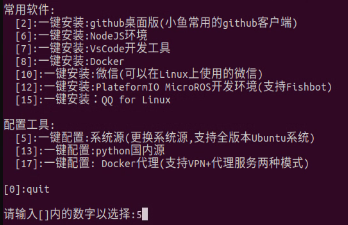
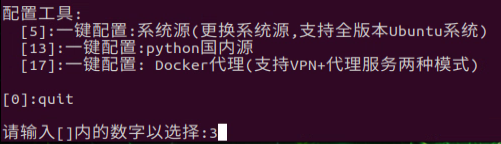
之后出现以下选项,输入数字5,按下回车键,实现系统源的更换。
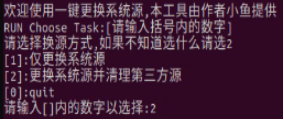
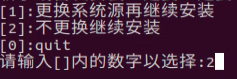
之后,输入数字2,按下回车键,一键配置系统源
配置完系统源后,出现下方界面,输入数字1,按下回车键,添加ROS/ROS2源
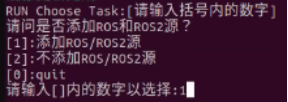
此时,系统源的相关设置完成,下一步就是安装ROS2。
二、一键安装
打开ubuntu终端,输入命令:
wget http://fishros.com/install -O fishros && . fishros
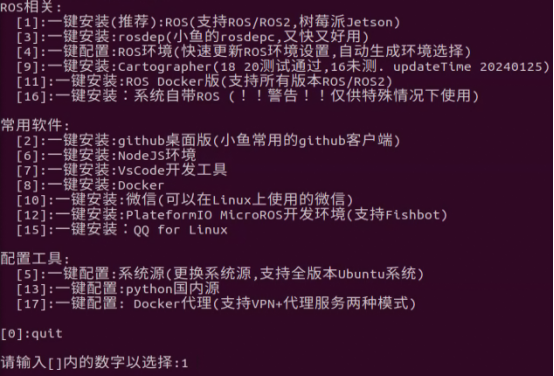
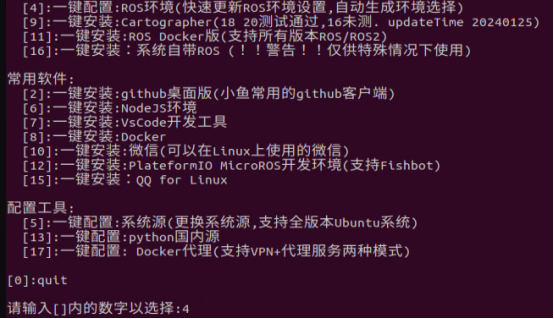
然后我们输入 1 一键安装 –> 不更换源安装 –> 选择你ubuntu版本对应的ros版本 –> 进行安装
输入数字2(不更换源安装)
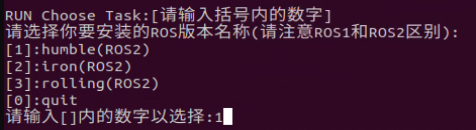
输入数字1,选择humble(ROS2)
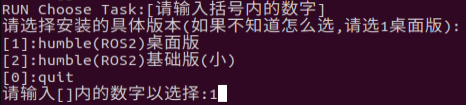
输入数字1,选择humble(ROS2)桌面版
安装完成后新建一个终端,打开输入:
ros2 run turtlesim turtlesim_node
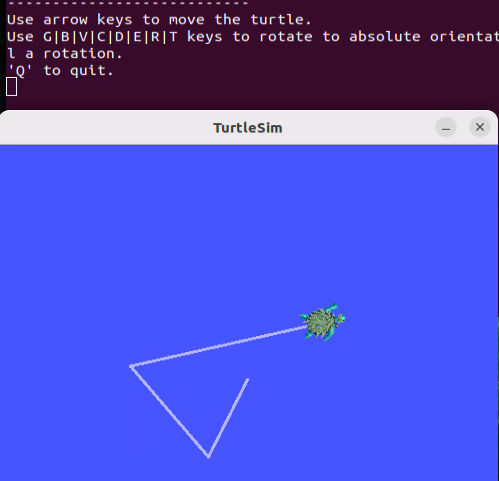
这会启动海龟仿真窗口,中间会出现一只默认的小海龟。

另开一个终端,运行以下命令:
ros2 run turtlesim turtle_teleop_key
启动后,终端会提示:Use arrow keys to move the turtle。此时可以通过键盘的 方向键 控制小海龟移动。
三、配置 rosdep
打开ubuntu终端,输入命令:
wget http://fishros.com/install -O fishros && . fishros
再输入 3 就一键配置了( 注意,如果出现了“输入以下XXX指令完成更新"就按照终端中出现的指令进行更新即可。)
四、更新系统环境
打开ubuntu终端,输入命令:
wget http://fishros.com/install -O fishros && . fishros
再输入 4 就一键配置了
到这里,我们的ROS安装完成了。
实验02-工作包的创建及编译
1. 创建 ROS2 工作环境包
在开发板系统中新建一个文件包(用户目录下即可,如:/home/sunrise),命名为ros2_ws,并在其子目录下新建一个文件包命名为src。随后将arm_demo资源包发送到开发板系统中的ros2_ws/src目录下。
2. 搭建编译环境(如已搭建好可略过)
步骤 1:安装 MoveIt 2
# 对于 ROS 2 Humble (推荐)
sudo apt install ros-humble-moveit步骤 2:验证 MoveIt 2 安装
# 查找 moveit_core 包
ros2 pkg prefix moveit_core# 应该返回类似路径:
# /opt/ros/humble/share/moveit_core
步骤 3:更新工作空间依赖
cd ~/ros2_ws
rosdep install --from-paths src --ignore-src -y(如未安装 rosdep 需先安装,安装不成功可参考鱼香 ROS 的 rosdepc,并将 rosdep 指令替换为 rosdepc)
步骤 4:修改 CMakeLists.txt
在 arm_demo/CMakeLists.txt 中,确保有以下关键部分:
# 在 find_package(ament_cmake REQUIRED) 后添加
find_package(moveit_core REQUIRED)
# 在包含路径中添加
include\_directories(include${moveit\_core\_INCLUDE\_DIRS})
步骤 5:检查添加 package.xml 依赖
在 arm_demo/package.xml 中添加:(如果已有直接跳过)
<depend>moveit_core</depend>
<depend>moveit_ros_planning</depend>到这里工作环境已经搭建好啦!
步骤 6:构建工作空间(检查工作环境,以arm_demo功能包为例,如没有请替换其他功能包或直接跳过)
cd ~/ros2_ws && colcon build --packages-select arm_demo实验03-运行 ROS2 话题通信节点
本实验通过同时运行两个ROS2话题节点实现对话测试。
实验步骤:
1)手动测试:
打开两个新终端
终端一:
cd ros2_ws
source install/setup.bash
ros2 run arm_demo dialog_terminal --ros-args -p username:=alice -p mode:=interactive -p topic_name:=/chat终端二:
cd ros2_ws
source install/setup.bash
ros2 run arm_demo dialog_terminal --ros-args -p username:=bob -p mode:=interactive -p topic_name:=/chat此时手动在两个终端输入信息,即可实现终端话题对话:


2)自动测试:
打开终端输入:
cd ros2_ws
source install/setup.bash
ros2 launch arm_demo topic_dialog.launch.py实验04-ROS2 相机应用
材料准备:一块RDK-X5主板,一个USB接口摄像头
1. 实验步骤
(1)摄像头连接检查
将usb摄像头连接开发板,并运行ls /dev/video*,检查摄像头连接, 如图所示摄像头连接成功。(此处采用video0为例)
如图所示摄像头连接成功。(此处采用video0为例)
(2)唤醒摄像头
1. 运行cd ~/ros2\_ws && colcon build --packages-select arm\_demo,进入ros2工作空间并编译arm_demo工作包。

2.随后运行source ~/ros2\_ws/install/setup.bash # 激活工作空间

3.最后运行ros2 launch arm_demo camera.launch.py #运行camera.launch.py文件(此处摄像头使用默认video0,如若要修改,修改launch文件默认值 在 `camera.launch.py` 的第26行)
此时会看到终端打印信息:
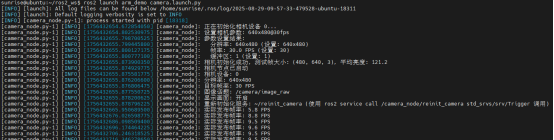

并且窗口出现实时画面
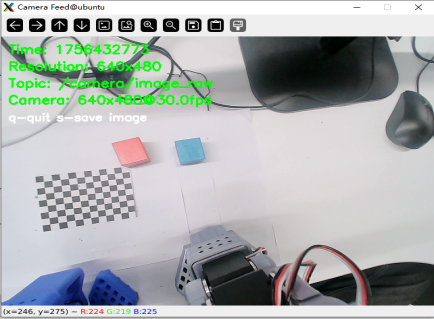
到这一步摄像头就已经成功被唤醒啦!