USB模块使用
USB 语音模块使用教程
命令集:
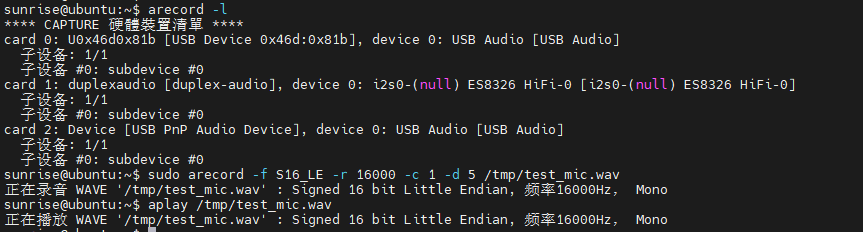
- arecord -l 识别麦克风的卡号与设备号(关注 card X 和 device Y )
- arecord -L 列出可用的 PCM 设备名(如 plughw:1,0 )
- aplay -l 检查扬声器/输出设备
- sudo arecord -f S16\_LE -r 16000 -c 1 -d 5 /tmp/test\_mic.wav //使用默认设备录 5 秒,16k/单声道/16bit:
- aplay /tmp/test\_mic.wav //播放音频
终端运行示例:(确保语音模块以及喇叭正确连接)
声源定位模块使用教程
- 硬件准备:
- 根据说明书焊接声源定位模块
效果如下图所示:
: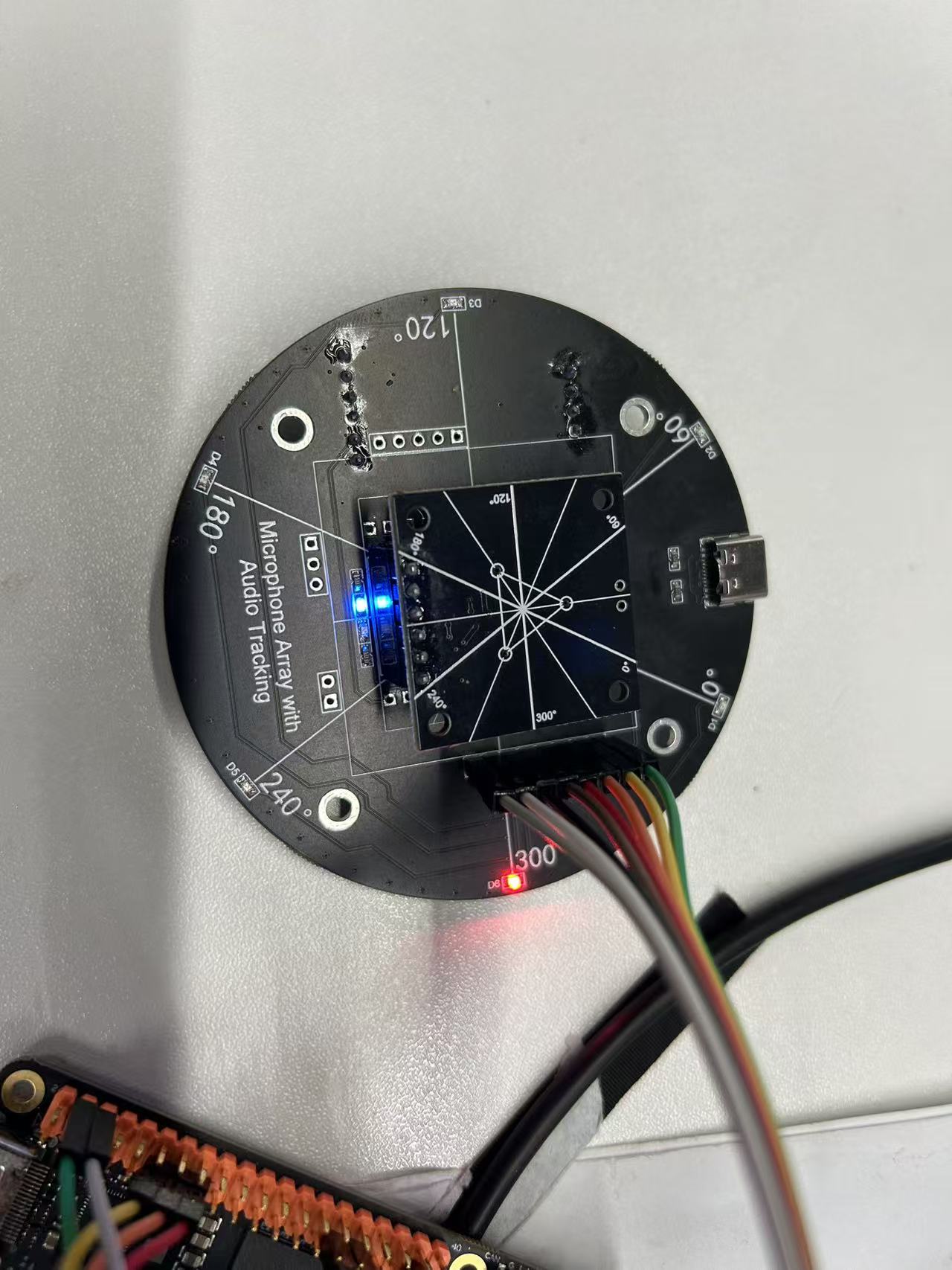

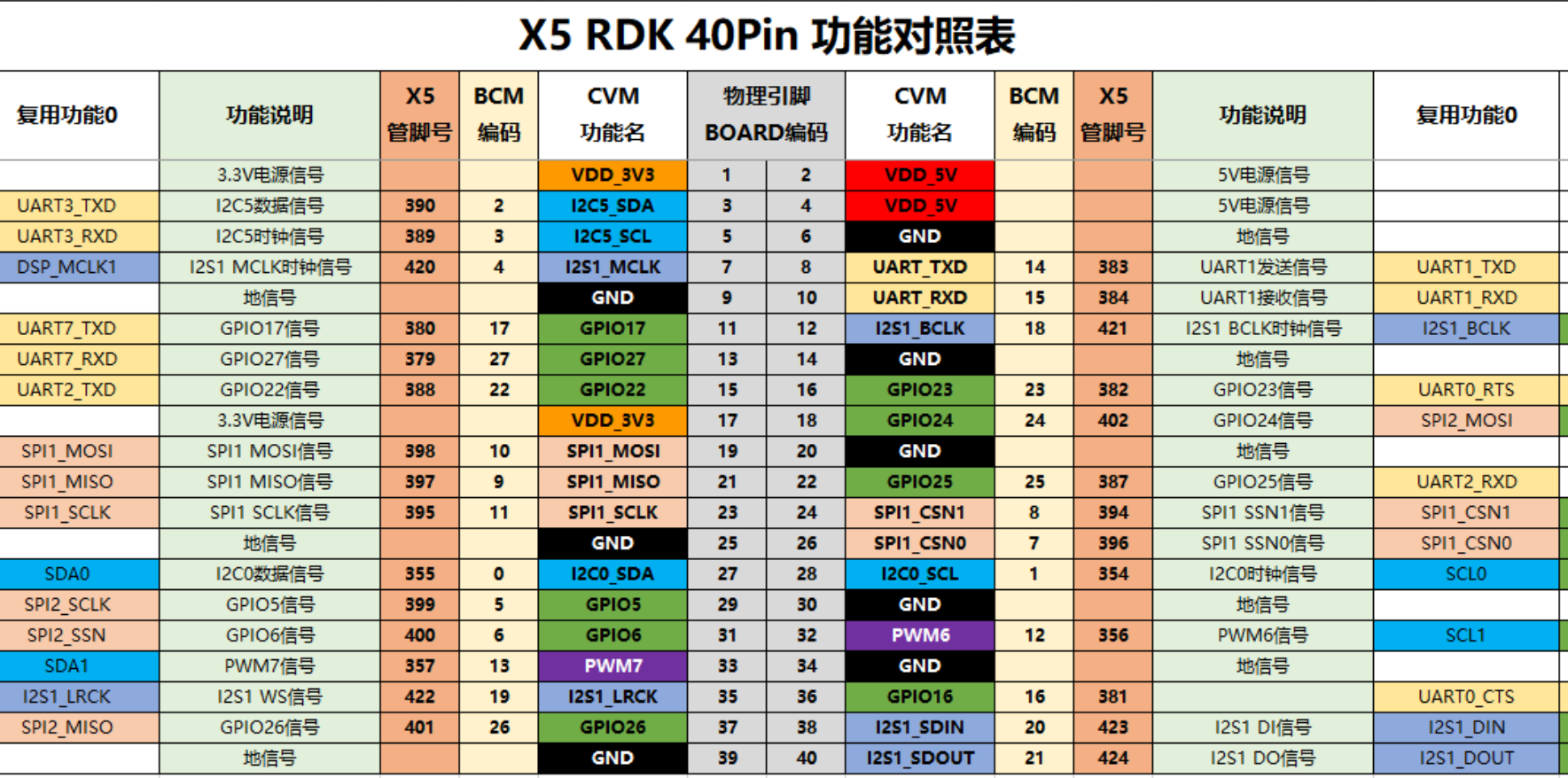
- 线路连接:将RDK-X5的物理引脚编号11.13.15.29.31.37与声源定位模块的0度、60度、120度、180度、240度、300度按顺序连接。模块的VCC、GND分别连接RDK-X5的5V、GND。
RDK-X5_40pin引脚图:
软件运行:
在RDK-X5上运行sound_localization.py文件: python ./sound\_localization.py
此时不同角度识别到的声源会在终端被读取打印出,终端运行效果如下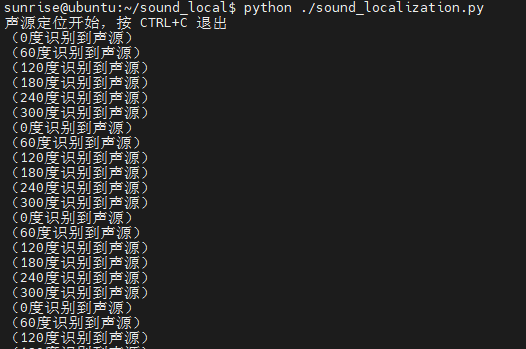
#!/usr/bin/env python3
import sys
import signal
import Hobot.GPIO as GPIO
import time
# 使用 BOARD 编码的引脚编号
pins = [11, 13, 15, 29, 31, 37]
angles = [0, 60, 120, 180, 240, 300]
def signal_handler(sig, frame):
sys.exit(0)
def main():
GPIO.setwarnings(False)
GPIO.setmode(GPIO.BOARD)
for pin in pins:
GPIO.setup(pin, GPIO.IN)
print("声源定位开始,按 CTRL+C 退出")
try:
while True:
for pin, angle in zip(pins, angles):
if GPIO.input(pin) == GPIO.HIGH:
print("({}度识别到声源)".format(angle))
time.sleep(0.1)
finally:
GPIO.cleanup()
if __name__ == '__main__':
signal.signal(signal.SIGINT, signal_handler)
main()