RDK-S100 硬件简介
1.2.1 RDK S100 系列
注意事项
- 禁止带电时拔插除 USB、HDMI 和网线之外的任何设备
- 选用正规品牌的电源适配器,否则会出现供电异常,导致系统异常断电的问题
- 建议使用板载 POWER ON/OFF 按键实现主板上下电,并在适配器断电状态下对 DC 头进行插拔。
烧录准备
供电
RDK S100 开发板通过 DC 接口供电,推荐使用套件中自带的电源适配器。
存储
RDK S100 采用 eMMC 作为系统启动介质。
显示
RDKS100 开发板支持 HDMI 显示接口。通过对应的线缆将开发板与显示器相连接,可实现图形化桌面显示。
网络连接
RDK S100 开发板支持以太网、Wi-Fi 两种网络接口,用户可通过任意接口实现网络连接功能。
驱动下载
安装 USB 驱动 对于 Windows 操作系统,在使用 adb 和 fastboot 功能前,需要首先确认是否安装对应的驱动程序。
在开发板的 uboot 命令行下输入 fastboot 0,让开发板进入 fastboot 模式:
Warning: eth1 (eth0) using random MAC address - 9a:07:de:92:a2:c5
eth0: eth1
system_slot: 0 adc_boardinfo: 6a84
strap_pin = 0x45bc0 bootinfo = 0x0 bootcount = 0x1
boot_block_device [1]
flash boot
success!
Hit any key to stop autoboot: 0
Hobot$
Hobot$
Hobot$ fastboot 0此时,设备管理器会提示存在 USB download gadget 的未知设备。
未安装驱动时,设备管理器会提示存在 USB download gadget 的未知设备,如下图:
usb 驱动下载:(可至下载资源汇总下载)
下载sunrise5_winusb.zip压缩包,进行驱动安装,步骤如下:
1、解压sunrise5_winusb.zip。
2、进入sunrise5_winusb,右键点击install_driver.bat,选择以管理员身份运行。
成功安装驱动后,设备管理器会显示 Android Device 设备,如下图:
系统烧录
RDK S100 套件目前提供 Ubuntu 22.04 系统镜像,可支持 Desktop 桌面图形化交互。
注意
RDK S100出厂已经烧写测试版本系统镜像,为确保使用最新版本的系统,建议参考本文档完成最新版本系统镜像的烧写。
镜像下载
整机系统烧录
注意:目前需要将 SW3 拨至 ↑ 位置,使用板载 eMMC 来启动,暂时不支持从 M.2 NVMe 固态硬盘启动。
RDK S100 开发套件可借助 PC 端工具 D-Navigation 来完成 Ubuntu 系统的烧录工作。当前,该烧录过程支持两种 USB 下载模式,用户可在烧录工具的 “下载选取” 界面里的 “下载模式” 选项处进行选择。这两种模式的具体区别如下:
- U-Boot 烧录方式: 此模式依赖 RDK S100 进入 U-Boot 的烧录模式(即 fastboot 模式),在日常的烧录场景中使用较为频繁,能满足大多数常规的系统烧录需求。
- USB 烧录方式: 该模式基于 DFU 协议,当 RDK S100 遇到无法进入 U-Boot 模式,或者系统损坏导致设备变砖等特殊情况时,使用此模式帮助恢复系统。
下面给出使用 PC 工具 D-Navigation 烧录的具体烧录步骤。
注意:windows pc 上 D-Navigation 需要在驱动安装成功后才能使用,使用前请确保驱动安装成功。
提示:在烧录 Ubuntu 系统镜像前,需要做如下准备:
1.准备一根 Type-C 数据线,数据线的一端与板子的 Type-C 接口相连接,另一端与 PC 相连接。
2.下载镜像烧录工具 D-Navigation,,根据系统不同,启动地瓜芯片工具 D-Navigation 方式分为三种:
1)Windows 版本启动:
双击打开D-Navigation.exe
2)Ubuntu 版本启动:
xhost + sudo ./D-Navigation --no-sandbox
3)MacOS 版本启动(目前支持 M 芯片):
xattr -cr D-navigation.app # App 解除隔离,在终端执行 双击打开D-Navigation.exe
Uboot 烧录
- 准备 RDKS100 镜像包(RDK-S100资源汇总-product.zip)
2.解压后得到 product 文件夹,结构如下所示,确保同一个文件夹内有img_packages文件夹和xmodem_tools文件 
3.开发板上电
提示:U-Boot 方式需要占用串口,须保证串口没有被其它设备或应用占用。
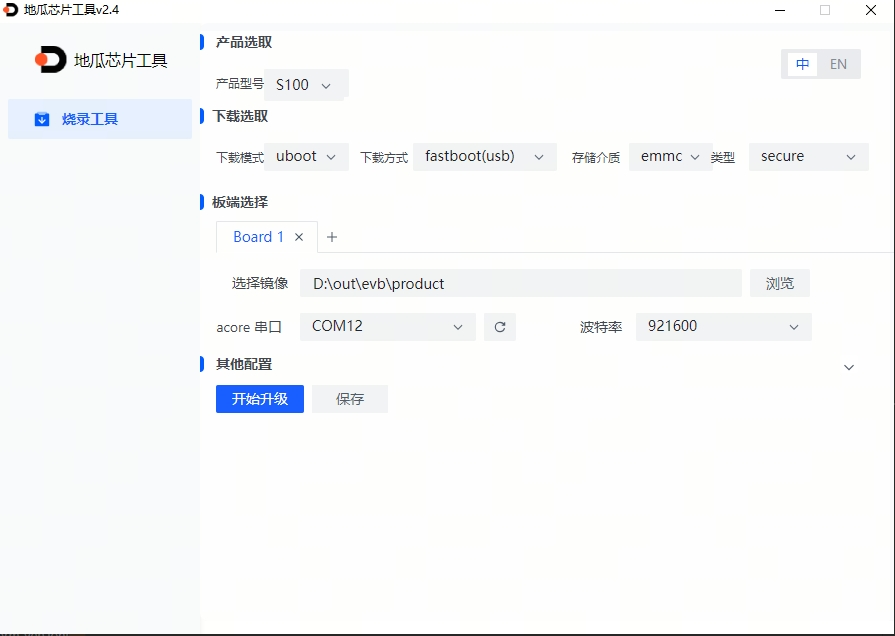
4.打开地瓜芯片工具 D-Navigation,完成如下操作:
- 选择产品型号:S100
- 下载模式:uboot;介质存储 emmc;类型:secure
- 点击浏览选择固件所在 product 文件夹
- 选择与 RDK S100 连接的串口,波特率 921600
- 点击开始升级(升级过程中,如有'Need manual reset'提示,请重新上电)
待升级完成后重新上电
USB 烧录(空片烧录或烧挂重新烧录)
1.准备 RDKS100 镜像包(RDK-S100资源汇总-product.zip)
2.解压后得到 product 文件夹,结构如下所示,确保同一个文件夹内有img_packages文件夹和xmodem_tools文件 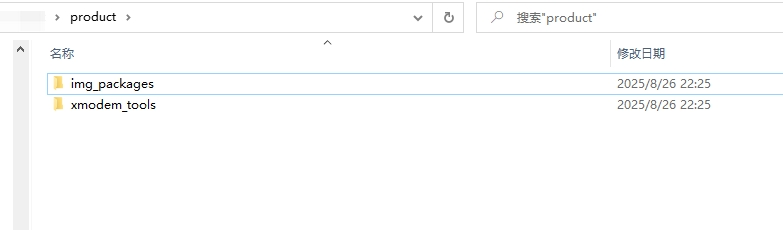
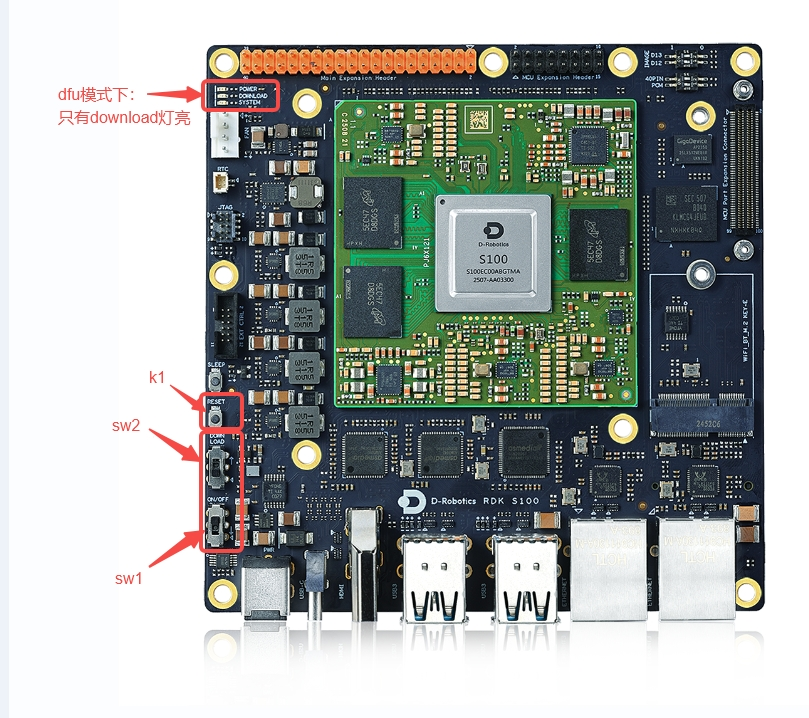
2.将设备切换到 DFU 模式,具体步骤:
- 将 SW1 拨码至 ↑,关闭电源
- 将 SW2 拨码至 ↑,进入 Download 模式
- 将 SW1 拨码至 ▽,开启电源
- 如果DOWNLOAD灯亮,则进入 DFU 模式,否则按下K1复位系统。
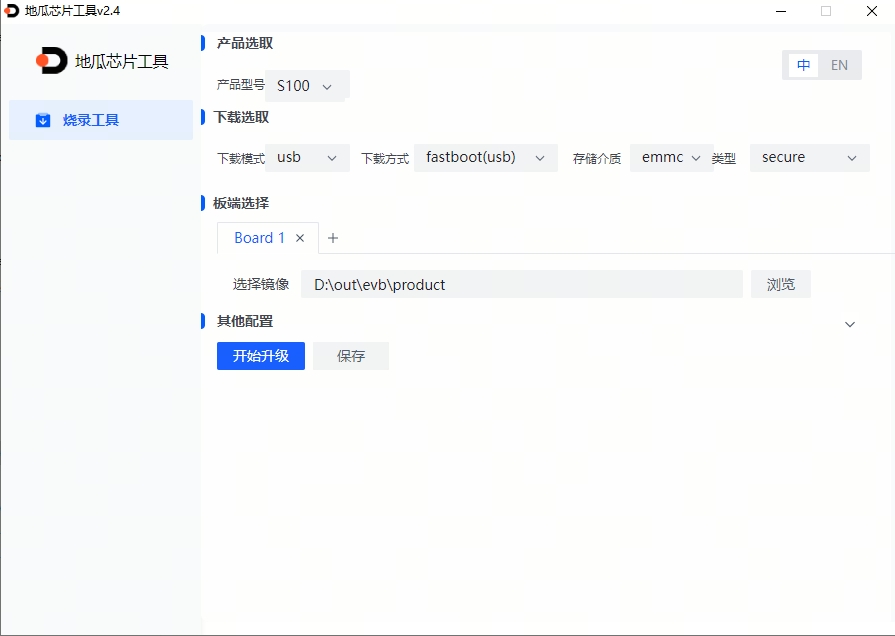
3.打开地瓜芯片工具 D-Navigation,完成如下操作
- 选择产品型号:S100
- 下载模式:usb;介质存储 emmc;类型:secure
- 点击浏览选择固件所在 product 文件夹
- 设备断电重启,点击开始升级,等待升级完成
4.升级完成后,关闭电源,将烧录开关向下拨动后(从 DFU 模式退出),重新上电。
Miniboot 及文件系统升级
D-Navigation 工具支持对 S100 进行[Miniboot 镜像]更新,在客户需要保留根文件系统修改(例如自行安装的 python/deb 包)时,可以在板端使用sudo apt update && sudo apt upgrade进行文件系统升级后,使用 D-Navigation 工具进行 Miniboot 镜像升级。
Miniboot 系统烧录整体流程与[整系统烧录]一致,需要额外配置:
- 点击“其他配置”最右边的箭头;
- 点击并选中“分区选择”;
- 去掉勾选“emmc”;
Uboot 烧录示例如下图: 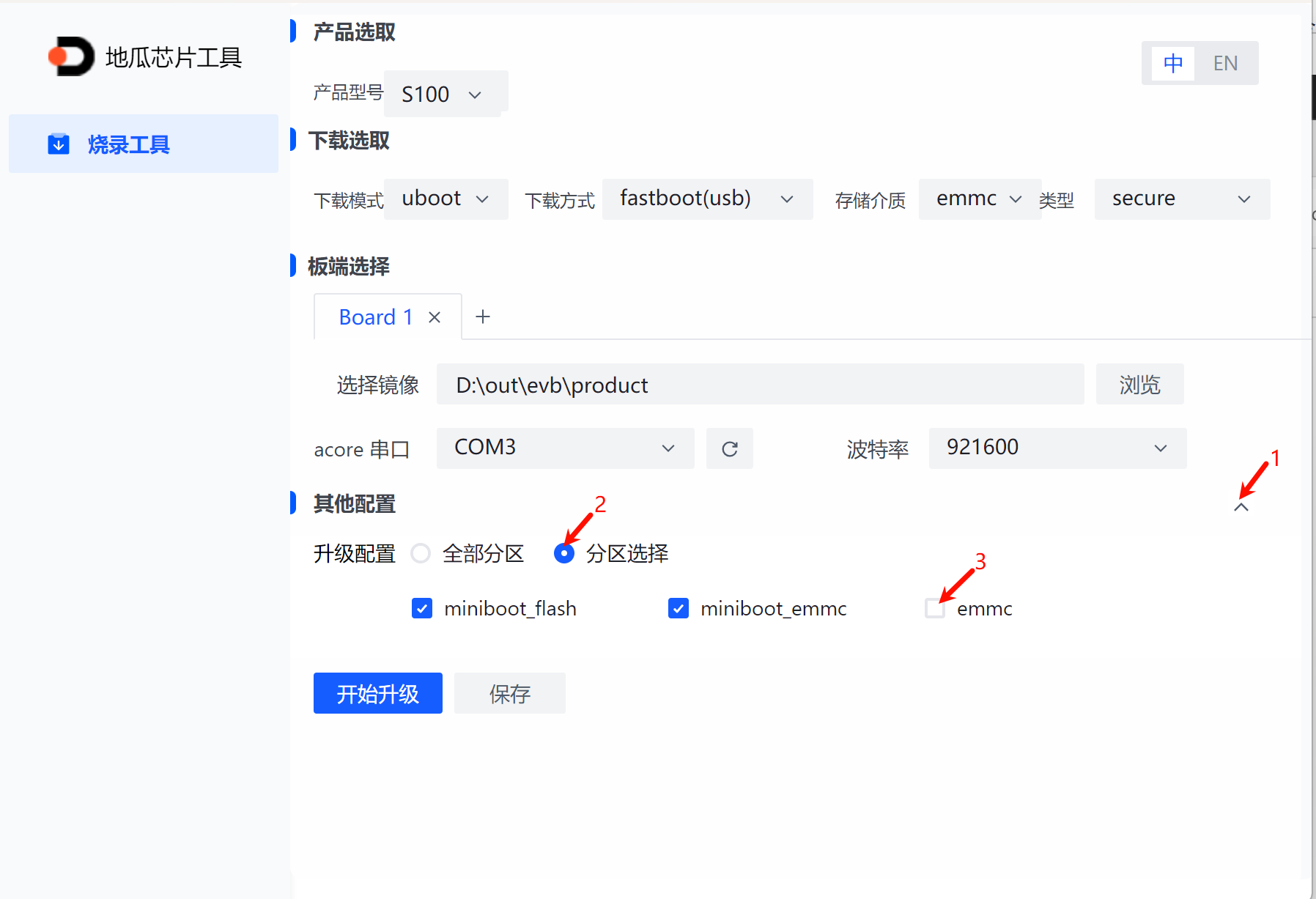
USB 烧录示例配置如下图: 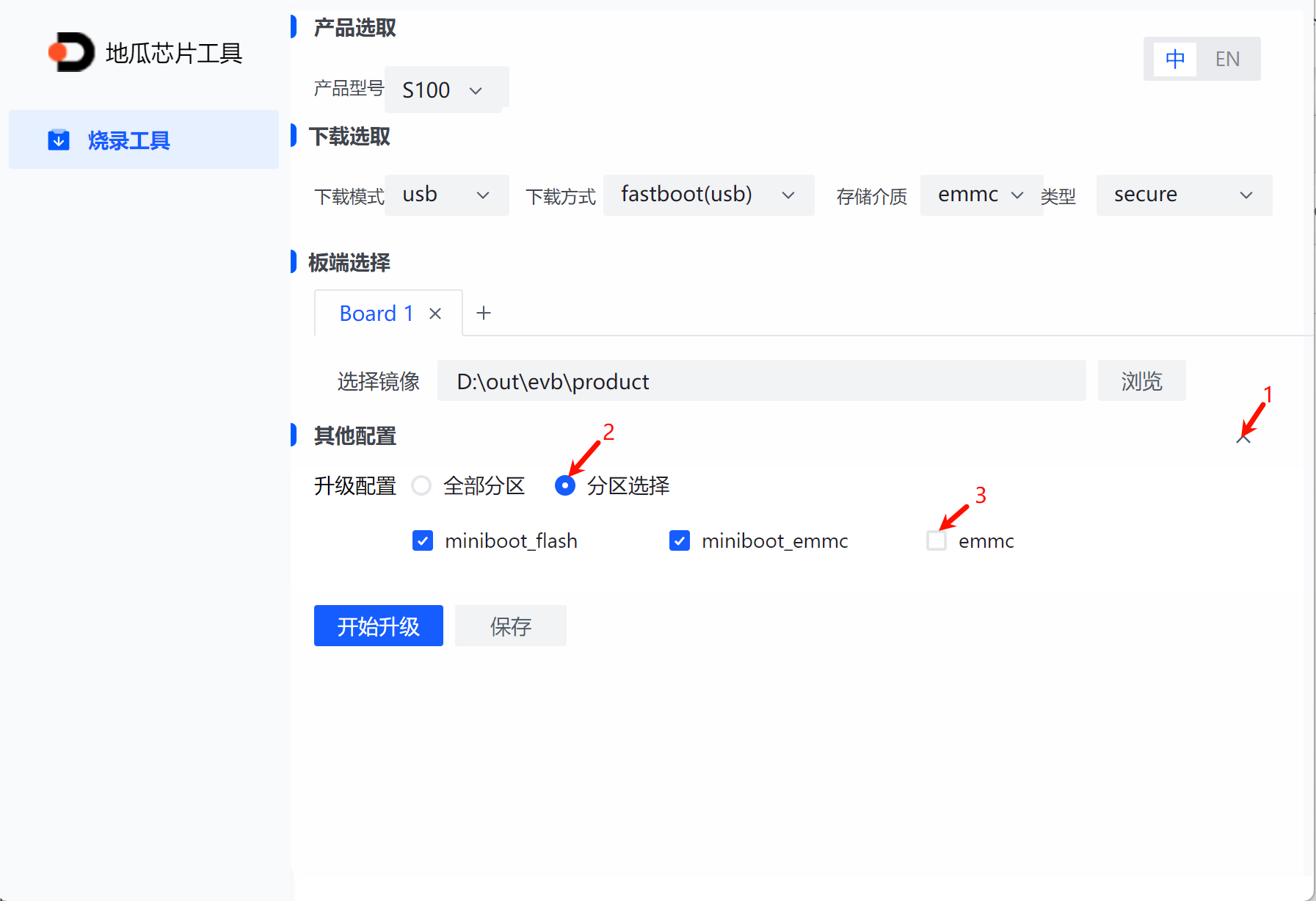
启动系统
首先保持开发板断电,并通过 HDMI 线缆连接开发板与显示器,最后给开发板上电。
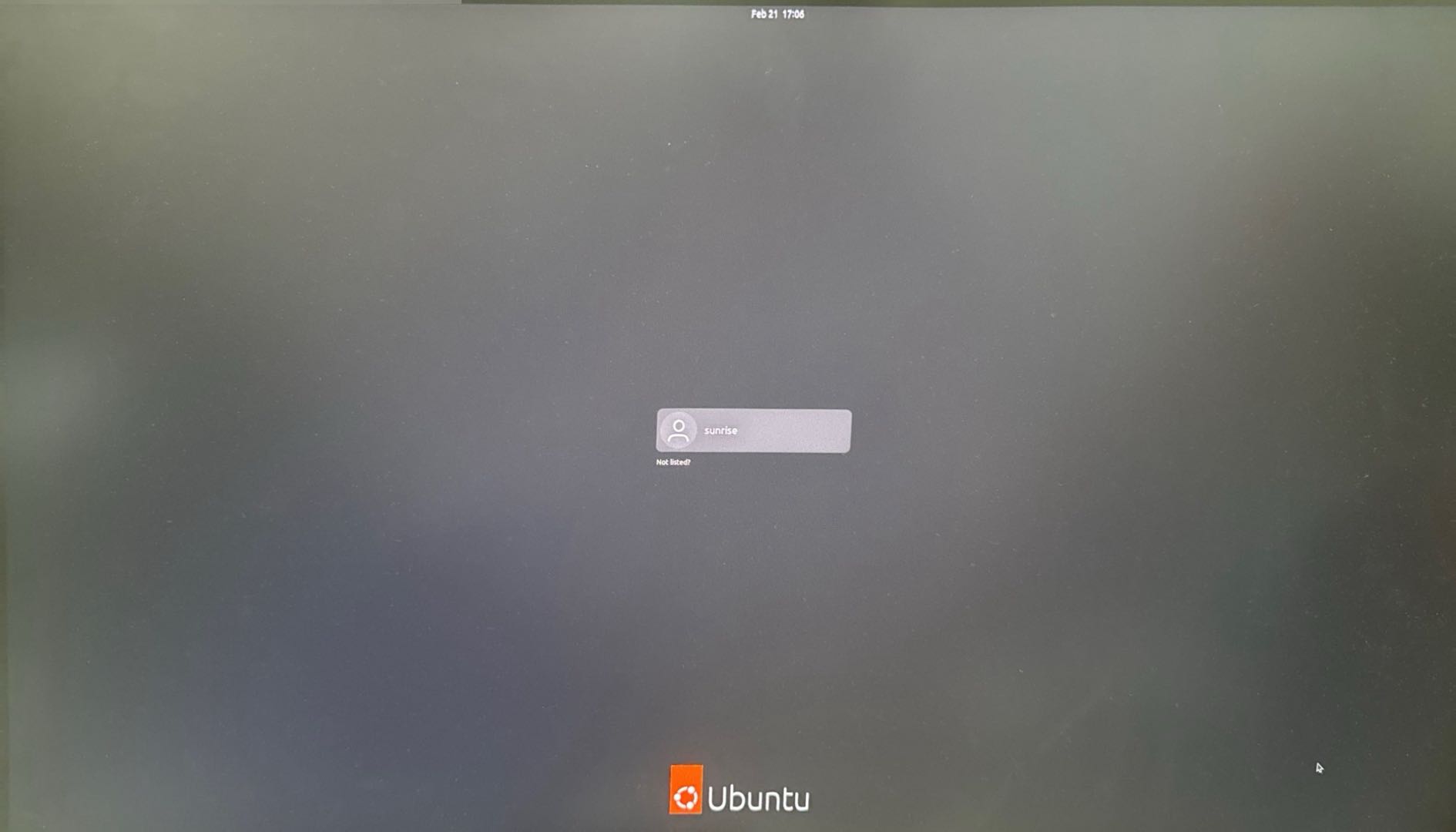
系统首次启动时会进行默认环境配置,整个过程持续 45 秒左右,配置结束后会在显示器输出 Ubuntu 系统桌面。
开发板指示灯说明
- 绿色 指示灯:点亮代表硬件上电正常
如果开发板上电后长时间没有显示输出(2 分钟以上),说明开发板启动异常。需要通过串口线进行调试,查看开发板是否正常。
Ubuntu Desktop 版本系统启动完成后,会通过 Display 传输接口在显示器上输出系统桌面,如下图: