02 设备树介绍
设备树是嵌入式Linux开发人员必备的技能,因为在现在的Linux版本中ARM相关的驱动几乎全部采用设备树的方式进行开发,当然包括本教程中使用到的RK3568Linux内核。可以这么说,设备树就是一张详细的开发板的硬件原理图在软件层的体现,不管是OpenHarmony还是Linux开发,这都是必需能看懂的板级描述文件,就好比做单片机的开发软件工程师必须要能看懂原理图!所以把设备树放在第一个学习章节,但是作为第一章可能有一定的难度,如果朋友们决定一下子不能理解,不妨先往后从GPIO开始学习,后续需要用到设备树时再返回来看~
不管什么外设驱动, GPIO 驱动基本都是必须的,而 pinctrl 和 gpio 子系统又是 GPIO 驱动必须使用的,所以就将 pintrcl 也放在这一章节进行讲解了,相信如果明白了设备树的原理,这两个部分就是手到擒来了。
1 设备树介绍
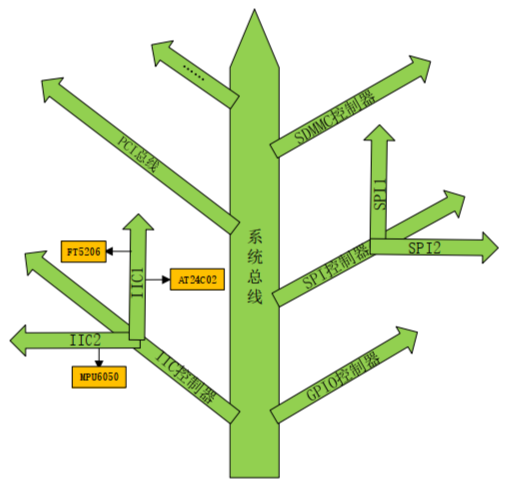
设备(Device Tree)的描述文件叫做DTS(Device Tree Source),DTS文件采用树形结构描述板级信息,以系统总线为中心,逐级进行发散,如下图所示:
随着智能手机等嵌入式设备的发展,每年新出的 ARM架构芯片少说都在数十、甚至数百款, Linux 内核下板级信息文件将会成指数级增长!这些板级信息文件都是.c 或.h 文件,如果都被硬编码进 Linux 内核中,那Linux内核将充斥着很多无用的信息。
之后 ARM 社区就将这些描述板级硬件信息的内容都从 Linux 内中分离开来,用一个专属的文件格式来描述,这个专属的文件就叫做设备树,文件扩展名为.dts。 一个 SOC 可以作出很多不同的板子,这些不同的板子肯定是有共同的信息,将这些共同的信息提取出来作为一个通用的文件,其他的.dts 文件直接引用这个通用文件即可,这个通用文件就是.dtsi 文件,类似于 C 语言中的头文件。 一般来说,.dtsi 描述 SOC 级信息(也就是 SOC 有几个 CPU、主频是多少、各个外设控制器信息等),.dts 描述板级信息(也就是板子上有哪些 IIC 设备、 SPI 设备等)。
提示
在本教程中,对应一些相对简单的外设,笔者将会带大家去查看设备树中的节点信息,并对DTS代码做一个简单的解析,从而了解到该外设的一些基本信息。帮助大家逐渐对设备树的语法以及结构做进一步了解
2 设备树语法
即使是Linux驱动开发人员,也不会拿到一个SOC以后从头到尾的写一个新的.dts文件出来,而是直接根据半导体厂家提供的.dts文件进行修改从而实现对自家板子的适配。
2.1 .dtsi头文件
一般.dtsi 文件用于描述 SOC 的内部外设信息,比如 CPU 架构、主频、外设寄存器地址范围,比如 UART、 IIC 等等。 通过"#include"进行引用,比如 rk3568.dtsi 就是描述 RK3568 芯片本身的外设信息, 截取内容如下:
注意
因为 OpenHarmony 为了保证源码的洁净,芯片厂家的修改统一通过patch打入
因此有两个方法获取完整的 rk3568.dtsi
方法一:编译一遍源码,在 out/kernel/src_tmp/linux-5.10/arch/arm64/boot/dts/rockchip 目录下即可获得。
方法二:通过指令将patch文件直接打入源码中,但这种代码会污染 OpenHarmony 的原始代码。
相关信息
rk3568.dtsi地址: out/kernel/src_tmp/linux-5.10/arch/arm64/boot/dts/rockchip
// SPDX-License-Identifier: (GPL-2.0+ OR MIT)
/*
* Copyright (c) 2020 Rockchip Electronics Co., Ltd.
*/
#include <dt-bindings/clock/rk3568-cru.h>
#include <dt-bindings/interrupt-controller/arm-gic.h>
#include <dt-bindings/interrupt-controller/irq.h>
#include <dt-bindings/pinctrl/rockchip.h>
#include <dt-bindings/soc/rockchip,boot-mode.h>
#include <dt-bindings/phy/phy.h>
#include <dt-bindings/power/rk3568-power.h>
#include <dt-bindings/soc/rockchip-system-status.h>
#include <dt-bindings/suspend/rockchip-rk3568.h>
#include <dt-bindings/thermal/thermal.h>
#include "rk3568-dram-default-timing.dtsi"
/ {
compatible = "rockchip,rk3568";
interrupt-parent = <&gic>;
#address-cells = <2>;
#size-cells = <2>;
aliases {
csi2dphy0 = &csi2_dphy0;
csi2dphy1 = &csi2_dphy1;
csi2dphy2 = &csi2_dphy2;
dsi0 = &dsi0;
dsi1 = &dsi1;
ethernet0 = &gmac0;
ethernet1 = &gmac1;
gpio0 = &gpio0;
gpio1 = &gpio1;
gpio2 = &gpio2;
gpio3 = &gpio3;
gpio4 = &gpio4;
i2c0 = &i2c0;
i2c1 = &i2c1;
i2c2 = &i2c2;
i2c3 = &i2c3;
i2c4 = &i2c4;
i2c5 = &i2c5;
mmc0 = &sdhci;
mmc1 = &sdmmc0;
mmc2 = &sdmmc1;
mmc3 = &sdmmc2;
serial0 = &uart0;
serial1 = &uart1;
serial2 = &uart2;
serial3 = &uart3;
serial4 = &uart4;
serial5 = &uart5;
serial6 = &uart6;
serial7 = &uart7;
serial8 = &uart8;
serial9 = &uart9;
spi0 = &spi0;
spi1 = &spi1;
spi2 = &spi2;
spi3 = &spi3;
};
cpus {
#address-cells = <2>;
#size-cells = <0>;
cpu0: cpu@0 {
device_type = "cpu";
compatible = "arm,cortex-a55";
reg = <0x0 0x0>;
enable-method = "psci";
clocks = <&scmi_clk 0>;
operating-points-v2 = <&cpu0_opp_table>;
cpu-idle-states = <&CPU_SLEEP>;
#cooling-cells = <2>;
dynamic-power-coefficient = <187>;
};
cpu1: cpu@100 {
device_type = "cpu";
compatible = "arm,cortex-a55";
reg = <0x0 0x100>;
enable-method = "psci";
clocks = <&scmi_clk 0>;
operating-points-v2 = <&cpu0_opp_table>;
cpu-idle-states = <&CPU_SLEEP>;
};
cpu2: cpu@200 {
device_type = "cpu";
compatible = "arm,cortex-a55";
reg = <0x0 0x200>;
enable-method = "psci";
clocks = <&scmi_clk 0>;
operating-points-v2 = <&cpu0_opp_table>;
cpu-idle-states = <&CPU_SLEEP>;
};
cpu3: cpu@300 {
device_type = "cpu";
compatible = "arm,cortex-a55";
reg = <0x0 0x300>;
enable-method = "psci";
clocks = <&scmi_clk 0>;
operating-points-v2 = <&cpu0_opp_table>;
cpu-idle-states = <&CPU_SLEEP>;
};
idle-states {
entry-method = "psci";
CPU_SLEEP: cpu-sleep {
compatible = "arm,idle-state";
local-timer-stop;
arm,psci-suspend-param = <0x0010000>;
entry-latency-us = <100>;
exit-latency-us = <120>;
min-residency-us = <1000>;
};
};
};
...
...
};比如上述节选代码段主要描述了系统配置,外设接口别名映射,CPU配置,详细信息如下:
系统配置
compatible: 标识这是RK3568芯片interrupt-parent: 指定中断控制器为GIC#address-cells和#size-cells: 定义64位地址空间
外设接口别名定义 文件定义了丰富的外设别名映射,方便引用各种硬件接口包括:
接口 摄像头接口 • 3个CSI2 DPHY接口 显示接口 • 2个DSI接口 网络接口 • 2个以太网接口(GMAC) GPIO • 5组GPIO(gpio0-gpio4) I2C总线 • 6个I2C接口(i2c0-i2c5) 存储接口 • 4个MMC/SD卡接口 串口通信 • 10个UART串口(serial0-serial9) SPI总线 • 4个SPI接口(spi0-spi3) CPU配置
- CPU架构 : ARM Cortex-A55四核处理器
- CPU核心 : 4个CPU核心(cpu0-cpu3)
- 地址映射 : 每个核心有独立的寄存器地址
- 电源管理 : 支持PSCI(Power State Coordination Interface)
- 时钟管理 : 使用SCMI时钟框架
- 功耗管理 : 支持CPU睡眠状态,包括进入/退出延迟配置
- 热管理 : CPU0支持动态功耗系数和冷却单元
rk3568.dtsi 完整代码对应的描述信息,需开发者自行学习,该教程只会教学部分代码的信息
2.2 设备节点
设备树是采用树形结构来描述板子上的设备信息的文件,每个设备都是一个节点,叫做设备节点,每个节点都通过一些属性信息来描述节点信息,属性就是键—值对。
还是以2.1的代码段进行解释,第5行的"/"是根节点,每个设备树只有一个根节点,aliases和cpus是根节点的子节点,cpu0、cpu1、cpu2、cpu3 是cpus的子节点。
节点的常见命名方式为:
label: node-name@unit-addresslabel是节点标签,可以直接通过 &label 来访问这个节点node-name是节点名字,为ASCII编码,用于清晰的描述节点的功能unit-address是设备的地址或寄存器首地址
以节点 cpu2: cpu@200 为例,标签为cpu2表示第三个cpu,完整的设备名称是cpu@200,表示单元地址为@200的cpu。
2.3 标准属性
节点是一个个具体的设备,每个设备都有各自的属性,除了用户自定义的属性外,用的最多的是标准属性。下面将逐一进行介绍:
1. compatible 属性
是一个字符串列表,compatible 属性用于将设备和驱动绑定起来,选择设备所要使用的驱动程序。常见格式为:
compatible = "manufacturer,model";属性值为厂商名加对应的驱动模块名。举个例子:
compatible = "sony,imx415";
// 日本sony 公司生产的imx415相机传感器模块2. model 属性
是一个字符串,描述板子的名字或者设备模块信息,比如:
model = "Rockchip rk3568 EVB DDR4 V10 Board";
// 由瑞芯微推出的,基于 RK3568 芯片,搭载DDR4 内存,硬件版本为V1.0的板子3. status 属性
是一个字符串,用于描述设备状态信息。常见的状态值包括:
| 状态值 | 描述 |
|---|---|
| "okay" 或 "ok" | 设备可操作 |
| "disabled" | 设备当前不可操作,但在将来可能变为可操作 |
| "fail" | 设备不可操作,设备中检测到了严重错误 |
| "fail-sss" | 设备不可操作,设备中检测到了严重错误,sss部分是特定于设备的附加信息 |
4. #address-cells 和 #size-cells 属性
uint32类型,用于描述子节点的地址信息:
| 属性名 | 描述 |
|---|---|
| #address-cells | 定义了地址部分需要用几个32位整数(cell)来表示 |
| #size-cells | 定义了大小部分需要用几个32位整数(cell)来表示 |
5. reg 属性
用于描述设备地址空间资源信息或者设备地址信息,reg 属性的值一般是(address, length)对,即(地址,大小)。
以rk3568.dtsi关于uart5的描述为例:
uart5: serial@fe690000 {
xxxxxx
reg = <0x0 0xfe690000 0x0 0x100>;
xxxxxx
}- 第一个0x0:高32位地址(64位系统中为0)
- 0xfe690000:低32位基地址
- 第三个0x0:高32位大小(64位系统中为0)
- 0x100:低32位大小(256字节)
6. name 属性
字符串用于记录节点名字,不常见。
2.4 修改节点内容
产品开发过程中可能面临着频繁的需求更改,一旦硬件修改了,我们就要同步的修改设备树文件,毕竟设备树是描述板子硬件信息的文件,但是就会引入一个问题,比如我在.dtsi文件的i2c5节点上增加了一个ICM45686的子节点,但是别的板子不需要这部分内容。所以这里再介绍一下在.dtsi文件中追加内容的方式。
以在i2c5节点上增加了一个ICM45686的子节点为例
&i2c5 {
status = "okay";
clock-frequency = <400000>;
ICM45686@1e {
compatible = "TDK,ICM45686";
reg = <0x1e>;
};
};&i2c5 表示要访问 i2c5 这个 label 所对应的节点,比如 rk3568.dtsi 中的"i2c5: i2c@fe5e0000"。在i2c5下的子节点ICM45686里面描述ICM45686芯片的相关信息,就不会对这颗SOC的其他板子造成影响。
3 在内核中查看设备树
Linux下一切皆文件,使用HDC进入开发板的终端,进入路径 /proc/device-tree 可以看到根节点下的所有属性和子节点以文件的形式存在。
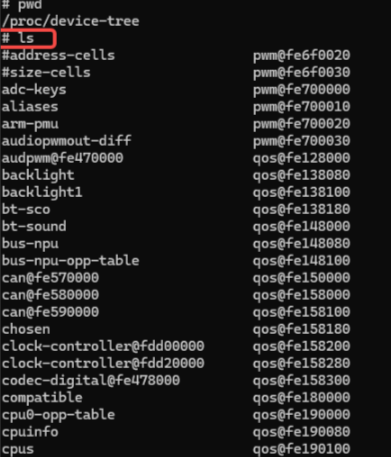
各个节点表现为文件,文件内包含的内容为节点的属性,可以通过cat,vim等方式进行查看。
比如在根节点进入cpus子节点,可以看到cpus节点的属性和各个子节点:
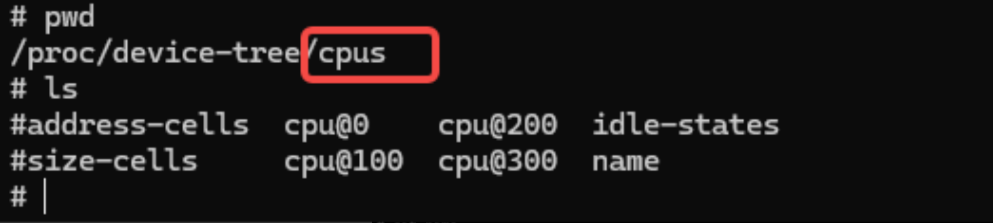
再进入cpu@100 节点,可以对其属性进行查看:

4 Pinctrl子系统
4.1 Pinctrl子系统介绍
现在的芯片随着外设资源的不断完善,不仅引脚数量非常的多,引脚可以复用的功能也非常的多,pinctrl子系统就是用来统一管理这些引脚复用和配置的工具。
4.2 Pinctrl在设备树中的体现
pinctrl在设备树中的描述通常分为2部分,一部分写一些复用选项,另一部分使用其中的一个复用选项。
在Pinctrl节点中定义"状态":
在SoC的.dtsi文件中,会有一个pinctrl节点,其中定义了多种可用的引脚功能组合,称为"状态"。
// 在soc的.dtsi文件中
&pinctrl {
// 定义一种状态:i2c1_default,表示I2C1的默认引脚配置
i2c1_default: i2c1-default-state {
// 配置这两组引脚的功能为I2C1,并设置上拉
pins = "GPIO0_5", "GPIO0_6";
function = "i2c1";
bias-pull-up;
};
// 定义另一种状态:gpio5_state,将GPIO0_5配置为GPIO输入
gpio5_state: gpio5-state {
pins = "GPIO0_5";
function = "gpio";
input-enable;
};
};在设备节点中引用状态:
在你的板级.dts文件中,当为一个设备(如I2C控制器)节点时,需要通过 pinctrl-names 和 pinctrl-0 属性来指定使用哪种状态。
&i2c1 { // 引用i2c1节点
status = "okay";
pinctrl-names = "default"; // 状态名为"default"
pinctrl-0 = <&i2c1_default>; // 使用之前定义的i2c1_default状态
clock-frequency = <100000>;
};4.3 Pinctrl使用示例
下面在rk3568平台下以添加一个LED的pinctrl为例进行举例:
假设想要使用GPIO0_D5控制一个LED,先查阅手册,确认GPIO0_D5的复用选项,在预先定义好的复用功能中选择复用为GPIO(RK_FUNC_GPIO),再设置其对应的电气属性如不进行上拉和下拉(&pcfg_pull_none)。
// 1. 定义LED的pinctrl配置集
&pinctrl {
led_pin: led-pin {
rockchip,pins = <0 RK_PD5 RK_FUNC_GPIO &pcfg_pull_none>;
};
};然后在板级文件 .dts中引用该复用的定义即可:
// 2. 在LED节点中引用(假设使用gpio-leds驱动)
/ {
leds {
compatible = "gpio-leds";
pinctrl-names = "default";
pinctrl-0 = <&led_pin>; // 引用上面定义的配置
my_led: led@0 {
label = "my_led";
gpios = <&gpio0 RK_PD5 GPIO_ACTIVE_HIGH>; // 注意:这里也要和pinctrl定义的引脚一致
default-state = "off";
};
};
};