01 指南
1 本教程的面向对象
随着越来越多开发者的加入以及国内各大科技公司对生态的完善,OpenHarmony近年来在嵌入式领域逐渐火热,但国内系统化的OpenHarmony教程目前还比较少,面向初学者的优秀开源教程更是寥寥无几,这也正是我们公司开源部门选择出本教程的原因-为开源鸿蒙的建设贡献自己的一份力。
我们主要面向零基础 或 有单片机经验的学生朋友以及嵌入式爱好者,侧重入门,给大家介绍外设与接口的基本原理并通过编写示例代码进行驱动。从软件安装到系统编译都有详细的教学文档,此外我们后续将在B站等平台推出配套的视频教程,所有资料全部开源,资料和教程还在不断完善,请大家持续关注更新.....
2 OpenHarmony 和 Linux 的概念与区别
2.1 嵌入式 Linux 介绍
嵌入式 Linux 是将标准 Linux 内核针对资源受限的嵌入式设备进行裁剪和优化的操作系统。核心组件和对应的功能如下表所示:
| 组件 | 功能 |
|---|---|
| Linux内核 | 提供进程管理、内存管理、驱动支持(如 GPIO、I2C)。 |
| BusyBox | 集成常用命令行工具(ls、cp)的轻量级工具集 |
| 文件系统 | YAFFS2/JFFS2(Flash存储)、EXT4(eMMC/SD卡)。 |
| 交叉编译工具 | 如arm-linux-gnueabi-gcc。 |
内核采用模块化设计,可以通过设备树文件动态加载驱动。且随着近些年嵌入式的发展,Linux内核对各个硬件外设的驱动做的已经非常完善(如WIFI,屏幕,摄像头等),可以在熟悉Linux开发框架后很方便的进行开发。
2.2 OpenHarmony 介绍
OpenHarmony 是由开放原子开源基金会运营的分布式操作系统,专为万物互联设计,支持从 KB 级到 GB 级内存的设备,采用分层设计
| 层级 | 功能 | 组件示例 |
|---|---|---|
| 内核层 | 多内核支持 | LiteOS-M(微内核)、Linux 内核 |
| 系统服务层 | 分布式能力 | 分布式软总线、设备虚拟化 |
| 框架层 | 开发接口 | ArkUI 声明式 UI、Ability 框架 |
| 应用层 | 跨设备部署 | 一次开发,多端运行 |
由于其支持多种内核,开发时,可以根据设备弹性部署系统,官方推荐,对于RAM < 128KB 的系统(STM32F4系列单片机的水平),选用LiteOS-M 内核的轻量系统。对于 RAM > 128MB 的设备,推荐使用Linux内核的标准系统。
2.3 OpenHarmony 和 Linux 的区别
如果直接对嵌入式Linux有过了解的朋友应该知道,其应用开发使用传统C/C++语言,UI框架大多使用Qt进行开发,应用开发需要通过交叉编译为不同硬件平台编译二进制应用。原生不支持设备互联需要开发者手动配置(通过MQTT协议等手动配置)。
在开发目标上,OpenHarmony 主要面向多设备协同,一方面由于其多内核特性,可以搭载在资源有限的系统上。另一方面其原生就支持设备互联,HUAWEI官方还为其设计了跨设备时可以自适应布局的UI设计框架-ArkUI,且使用鸿蒙开发框架编写的的HAP应用可以自动适配不同设备。 为大家简单作了以下总结:
| 特性 | 嵌入式Linux | OpenHarmony |
|---|---|---|
| 内核选择 | Linux | LiteOS-M / Linux |
| 开发语言 | C/C++ | ArkTS(前端)、C/C++(底层) |
| 设计目标 | 单设备高性能与稳定 | 多设备协调互联 |
| UI框架 | Qt/LVGL等(手动适配屏幕) | ArkUI(跨设备自适应布局) |
| 应用开发 | 需要为不同硬件编译二进制可执行文件 | HAP格式(自动适配不同设备) |
| 设备互联 | 手动配置(使用MQTT协议等) | 原生支持(软总线自动发现) |
| 开发哲学 | 一台设备一个系统 | 一次开发,多端部署 |
嵌入式Linux经过多年的发展,已具备完整的生态,但设备性能要求较高(1GB+ RAM)。OpenHarmony作为后起之秀,主要面向设备互联和低成本部署,但现阶段大版本更新过快,平均2个月更新一次,且高版本一般不支持向下兼容,API随时可能发生变化,不如Linux来的稳定。
3 OpenHarmony的开发方向
目前OPenHarmony的开发分为2个大方向。官方称之为南向开发和北向开发,本小节将分别进行介绍。
3.1 南向开发(底层硬件适配)
核心任务
- 硬件驱动开发:为芯片、传感器、外设(摄像头/屏幕)编写鸿蒙专属驱动(基于HDF框架)。
- 内核移植:将LiteOS或Linux内核适配到不同硬件平台(如ARM Cortex-M/RISC-V)。
技术栈
- 系统内核:内核码源、任务调度机制、内存管理等
- 驱动开发:设备树(DTS)配置,HDF驱动模型
- 通信协议:CAN、SPI、SDIO等总线驱动,WIFI/BT 协议栈...
3.2 北向开发(上层应用开发)
核心任务
- 应用功能实现:使用ArkTS开发跨设备应用(如智能家居控制中心)。
- 分布式能力集成:调用软总线实现设备协同(如手机控制电视播放)。
- UI/UX设计:利用声明式ArkUI实现自适应布局(手机/手表/电视多端适配)。
- 性能优化:确保应用在低端设备(如智能手表)上流畅运行。
技术栈
- 开发语言:ArkTS(TypeScript超集)、JavaScript
- UI框架:ArkUI声明式语法、组件化开发
- 分布式能力:设备发现(DeviceManager)、跨设备调用(RPC)、分布式数据管理(DataObject)
- 工具链:DevEco Studio(IDE)、hdc调试工具等
4 本教程使用的开发方式
打开本教程时,大家看到的章节标题应该是应用开发和设备开发而不是上小节提到的南向和北向。这四个开发方向的关系应该如下图所示:
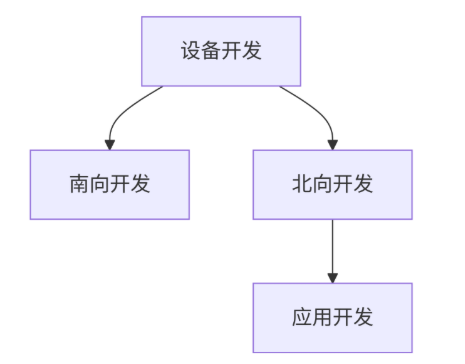
我们的教程面向的是设备开发,定位硬件设备的全流程开发,包括南向和北向。
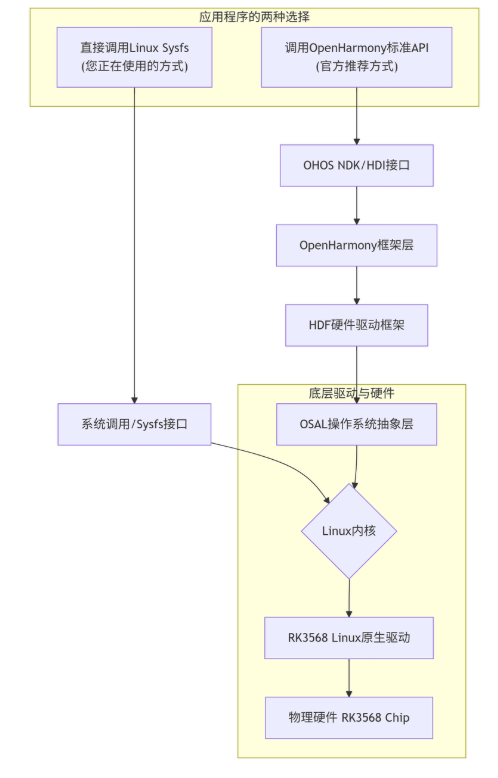
首先会对使用的外设进行基本原理的介绍,带大家对外设有一个认知以后,介绍对应外设在板卡上的接口。在通过命令行的方式对外设驱动进行测试,通过讲解设备树和内核中预装的测试指令等,顺便学习一些嵌入式Linux常用的工具和指令。检测外设成功以后,会通过给大家介绍如何在OpenHarmony框架下通过NAPI的方式开发的自己的API,并基于这些API编写应用程序基于常见外设做一些基本的应用带大家入门.
有些朋友可能会有疑问了,我们板卡预装的系统明明是OpenHarmony,为什么可以像Linux一样通过命令行方式进行开发呢?那是因为我们本教程使用的主控芯片RK3568足够的强大,所以我们使用的系统为基于Linux内核的标准系统,此时使用的OpenHarmony是基于Linux内核搭建的一套上层操作系统,所以自然就可以调用Linux内核向用户空间提供的接口,我们通过HDC调试工具连接开发板即可使用命令行进行开发测试。
最后再简述一下NAPI开发方式(下一版本教程后续会详细介绍):
在 OpenHarmony 上,Node-API(常简称 NAPI)是基于 Node.js 12.x LTS 的 Node-API 规范扩展的原生模块开发机制,为 ArkTS/JS 与 C/C++ 模块之间提供稳定、跨平台的交互能力。
核心流程可以概括为:
1.在 C/C++ 侧实现 native 方法并进行 NAPI 模块注册;
2.配置 CMake/构建把其编译为共享库(so);
3.为 ArkTS 侧提供类型声明(.d.ts,便于类型提示与编译);
4.在 ArkTS/ETS 侧 import 该 native 模块并调用导出的方法;
5.初始化时 import 时会触发模块注册、导出对象构建;
6.运行时调用通过导出对象转发到对应 C/C++ 实现。
5 瑞芯微RK3568 介绍
我们M4-R1 板卡使用的SOC是来自瑞芯微电子的RK3568

主要特性
- Quad-core Cortex-A55 up to 2.0GHz
- Mali-G52 GPU
- 1TOPS NPU
- LPDDR4/LPDDR4X/DDR4/DDR3/DDR3L/LPDDR3, ECC
- 4KP60 H.265/H.264/VP9 video decoder
- 1080P60 H.264/H.265 video encoder
- 8M ISP with HDR
- Dual dislplay, LVDS/MIPI-DSI/RGB/eDp/RGB/HDMI2.0/EBC
- 1x8ch I2S/TDM, 1x8ch PDM, 2x2ch I2S
- USB3.0 x2/SATA3.0 x3/PCIE2.1/QSGMII,PCIE3.0 1x2Lanes/2x1Lane
| 详细参数 | |
|---|---|
| CPU | • 四核64位Cortex-A55,主频最高2.0GHz • ARM G52 2EE |
| GPU | • 支持OpenGL ES 1.1/2.0/3.2,OpenCL 2.0,Vulkan 1.1 • 内嵌高性能2D加速硬件 |
| NPU | • 支持1T算力 |
| 多媒体 | • 支持4K 60fps H.265/H.264/VP9视频解码 • 支持1080P 60fps H.265/H.264视频编码 • 支持8M ISP,支持HDR |
| 显示 | • 支持多屏异显 • 支持eDp/HDMI2.0/MIPI/LVDS/24bit RGB/EBC |
| 接口 | • 支持USB2.0/USB3.0/PCIE3.0/PCIE2.1/SATA3.0/QSGMII |
(以上数据来源瑞芯微官网产品中心:https://www.rock-chips.com/a/cn/product/RK35xilie/2021/0113/1275.html)
RK3568这颗SOC在拥有不俗的算力下,支持OpenHarmony认证,对开源鸿蒙的适配做的相对比较完善 ,且外设资源丰富,是学习OpenHarmony标准系统的不二之选!
6 学习资料推荐
6.1 官方文档
- OpenHarmony官方文档:https://www.openharmony.cn/docs/zh-cn/overview
6.2 开发资料
由于瑞芯微不在官网提供数据手册和SDK等资料,这部分资料可以见我们为大家提供的百度网盘链接 "05-开发资料":
提示
下载链接: https://pan.baidu.com/s/1URTm7_dVX_xuG5UlyQQNlA?pwd=83ui
提取码: 83ui
资料路径: 01-开发资料(百度网盘) -> 05-开发资料
提示
所有资料和教程还在不断完善中,请大家持续关注更新。