03 导入SDK
1 使用ShimatePi M4-R1配套SDK开发
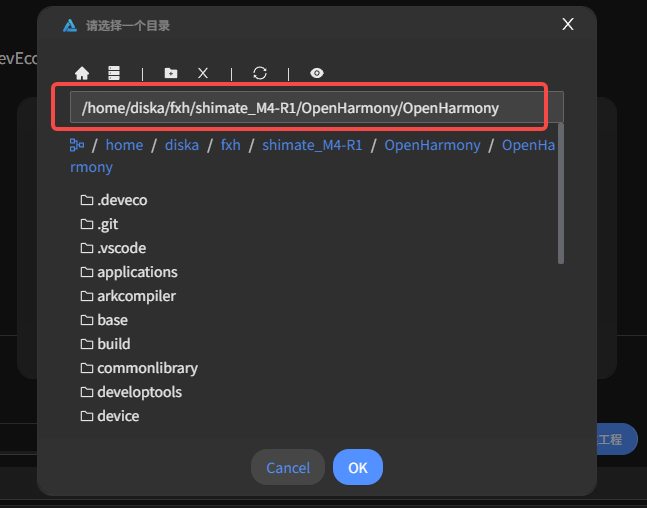
首先,您需要将ShiMatePi的OpenHarmony的码源保存到Ubuntu目录下,比如本示例的SDK路径如下:

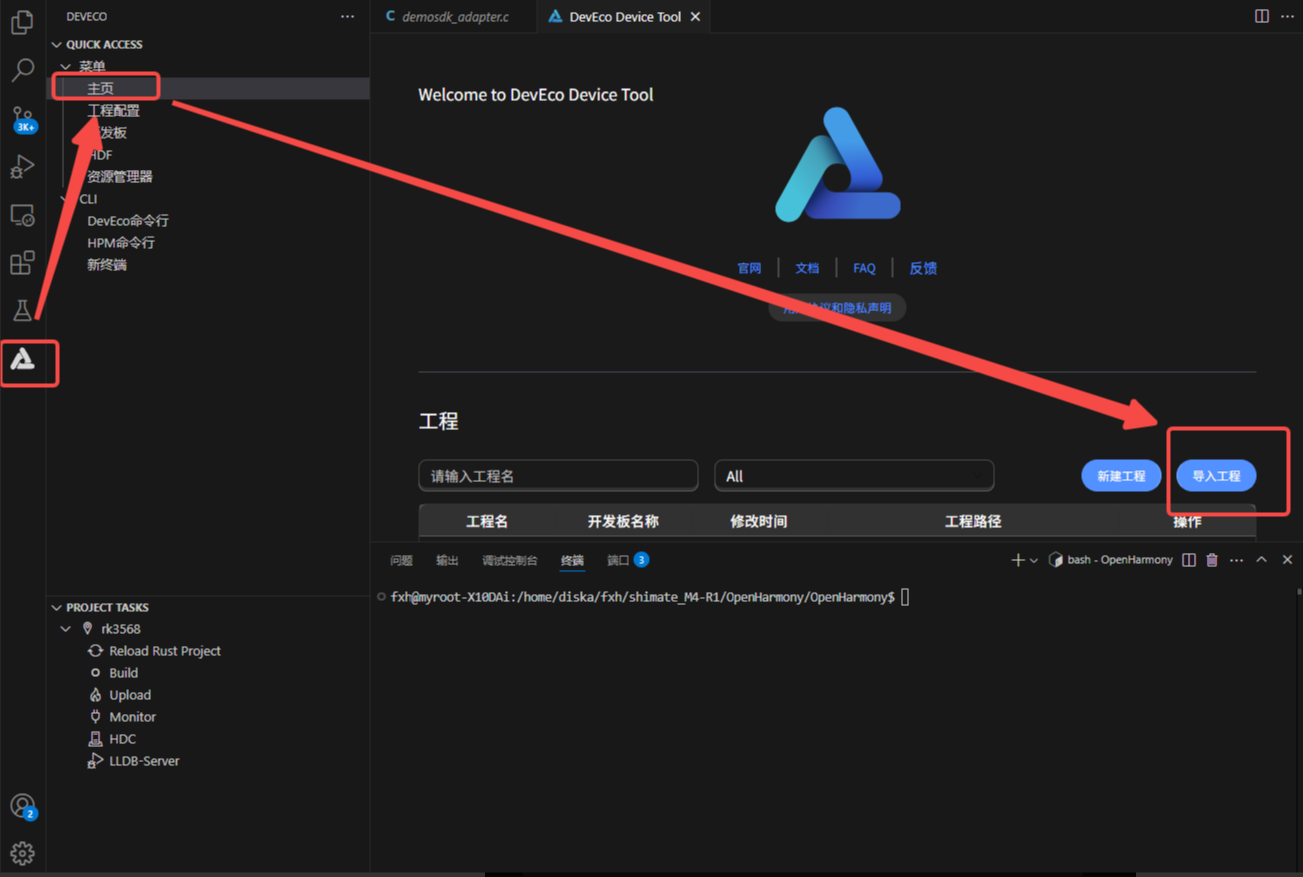
打开VSCode,打开DevEco Device Tool,在主页点击导入工程
在弹出的页面中选择你远程Ubuntu目录下的SDK位置,点击导入
此时,工具会自动加载脚本进行编译,等待完成即可。
2 使用官方发布版本进行开发
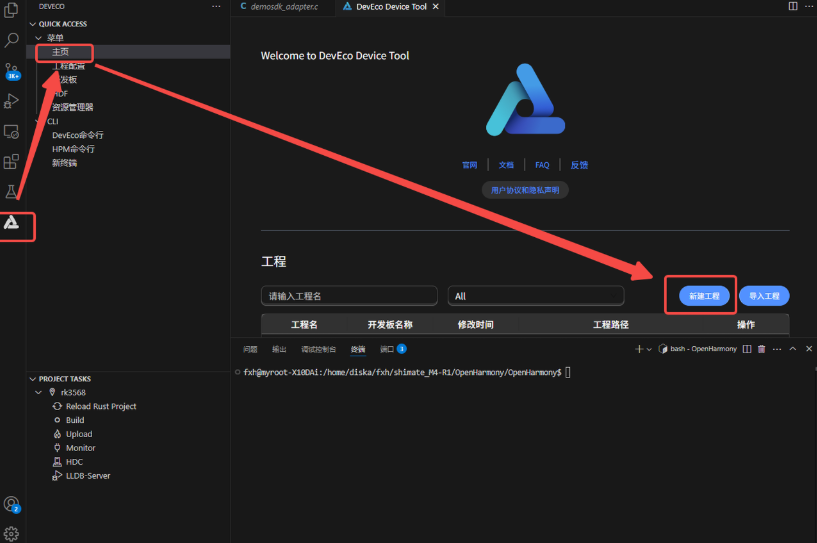
在主页中点击新建工程
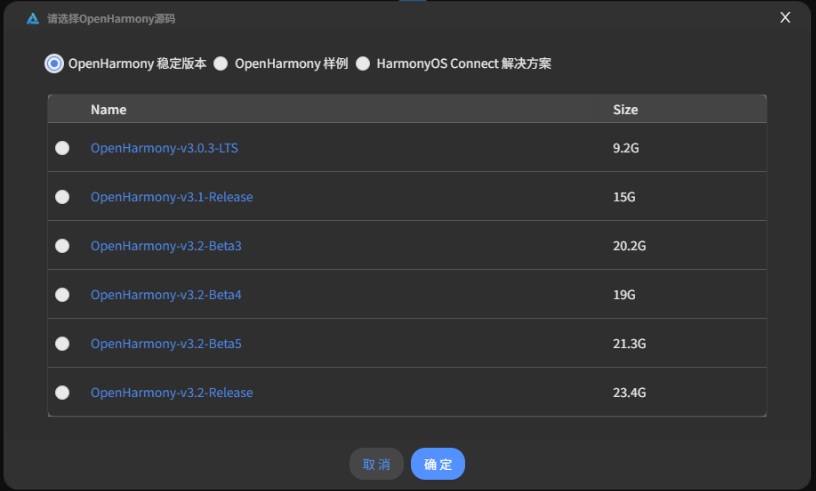
我们可以选择软件中已经预备的码源或OpenHarmony样例进行开发,这里随便选择一款开发板进行举例。
新工程的配置向导页,配置工程相关信息,包括:
- OpenHarmony Source Code:选择需要下载的OpenHarmony源码,请选择OpenHarmony Stable Version下的源码版本,支持OpenHarmony-v3.0.3-LTS、OpenHarmony-v3.1-Release、OpenHarmony-v3.2-Beta3、OpenHarmony-v3.2-Beta4、OpenHarmony-v3.2-Beta5、OpenHarmony-v3.2-Release、OpenHarmony-v4.0-Beta1、OpenHarmony-v4.0-Beta2版本。
- Project Name:设置工程名称。
- Project Path:选择工程文件存储路径。
- SOC:选择支持的芯片。
- Board:选择支持的开发板。
- Product:选择产品。
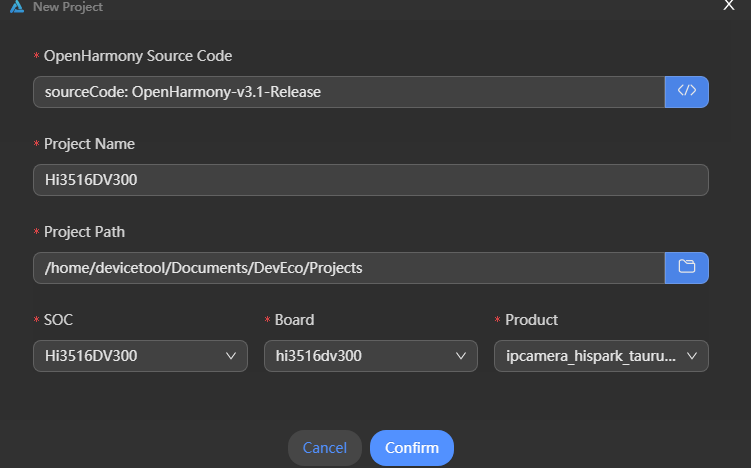
工程配置完成后,点击Confirm,DevEco Device Tool会自动启动OpenHarmony源码的下载。由于OpenHarmony稳定版本源码包体积较大,请耐心等待源码下载完成,我们可以在VSCode终端工具中看到下载进度。
