17 WIFI & BT
1 WIFI & BT 介绍
1.1 WIFI
WiFi(Wireless Fidelity)是基于 IEEE 802.11 标准的无线通信技术,核心功能是将设备通过无线方式接入局域网(LAN)。多年以来,WIFI几乎都是短距离条件下要求高速率无线通信的首选,有2.4GHz 和 5GHz 两个频段可选,常用于视频流,OTA升级等,通信速率要明显高于使用蓝牙。
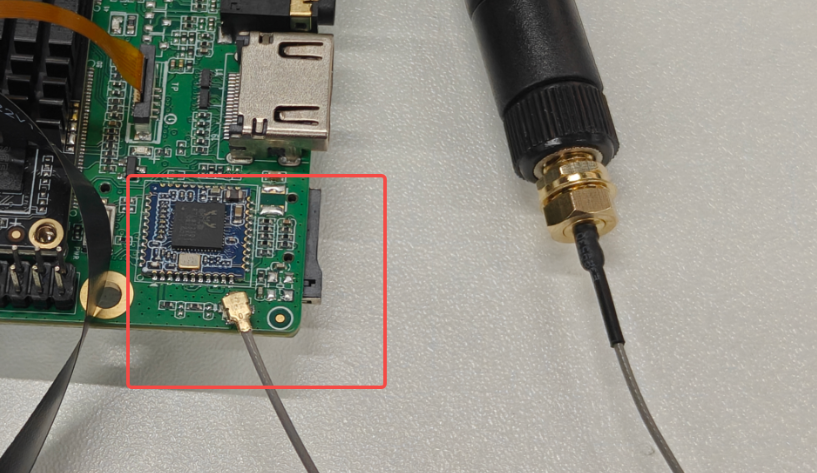
硬件上通常使用SDIO接口与主控芯片进行通信,使用时需要搭配天线来接收和发送电磁波信号,我们的嵌入式板卡一般是外接天线,如下图所示:

对于路由器这类对通信要求高的,使用的天线一般是下图这种:
 有些朋友会疑惑了,以前的大哥大手机还能看到天线,从触摸屏手机开始,视乎就看不到天线的存在了。其实早期是被集成到手机边款了,或者当时的手机边款就是天线。随着电路高度集成化,天线尺寸也越来越小,我们可以观察一下自己的手机,边款上的小横条其实就是负责各种功能(WIFI,Bluetooth,GPS,GMS等)的天线的了。
有些朋友会疑惑了,以前的大哥大手机还能看到天线,从触摸屏手机开始,视乎就看不到天线的存在了。其实早期是被集成到手机边款了,或者当时的手机边款就是天线。随着电路高度集成化,天线尺寸也越来越小,我们可以观察一下自己的手机,边款上的小横条其实就是负责各种功能(WIFI,Bluetooth,GPS,GMS等)的天线的了。
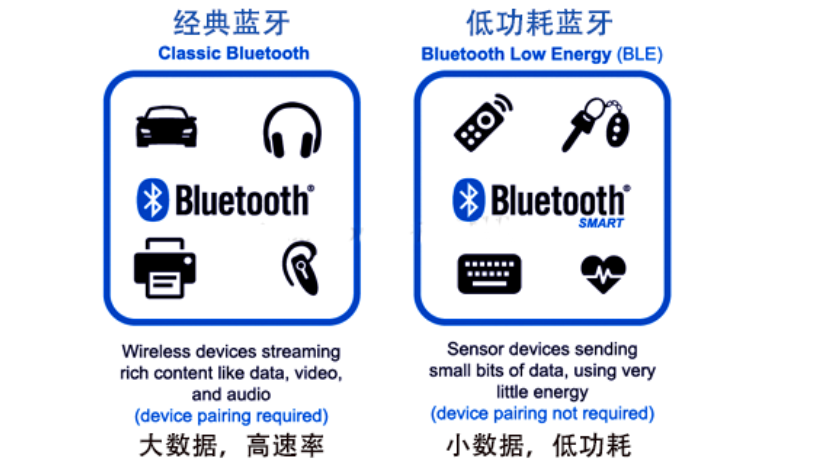
1.2 经典蓝牙(SPP)和低功耗蓝牙(BLE)
关于经典蓝牙和低功耗蓝牙,大家可以参考我总结的下表:
| 区别项 | 低功耗蓝牙(BLE) | 经典蓝牙(SPP) |
|---|---|---|
| 传输距离 | 距离较短,通信范围一般为10米左右 | 通信距离较远,可达100米 |
| 传输速率 | 1Mbps或更低 | 3Mbps或更高 |
| 蓝牙功耗 | 极低功耗,使用电池供电设备 | 较高功耗:经典蓝牙设计注重速度和传输容量,需要电源持续供电 |
| 硬件成本 | 低成本:BLE芯片和模块价格低廉 | 相比BLE价格稍高一些 |
| 开发难度 | 低复杂度:协议栈简单,易于开发 | 较高复杂度:协议栈较复杂,开发难度较大 |
| 典型应用 | 传感器、IoT 设备 | 蓝牙打印机、高速数据交换(图像传输、文件传输)等 |
 有些朋友可能会觉得好奇,BLE到底是使用了什么黑科技,功耗可以做到这么低呢?
有些朋友可能会觉得好奇,BLE到底是使用了什么黑科技,功耗可以做到这么低呢?
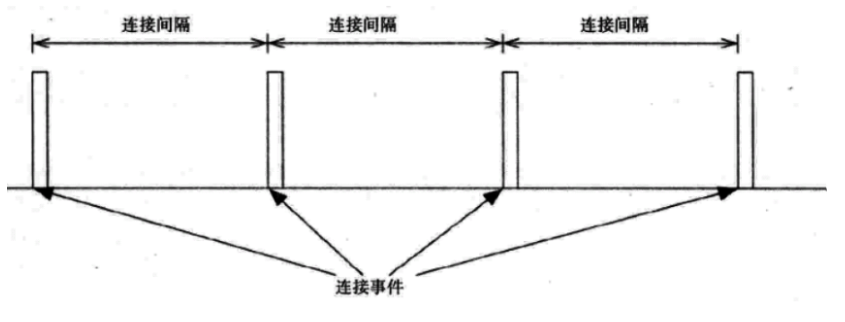
其实BLE传输数据时的功耗相比于SPP那可一点都不低!省电的关键在于以高功耗传输完数据以后,会进入一段时间的休眠,如下图所示,它只在连接事件发生时才进行数据传输:
我们再来看截图的功耗图:
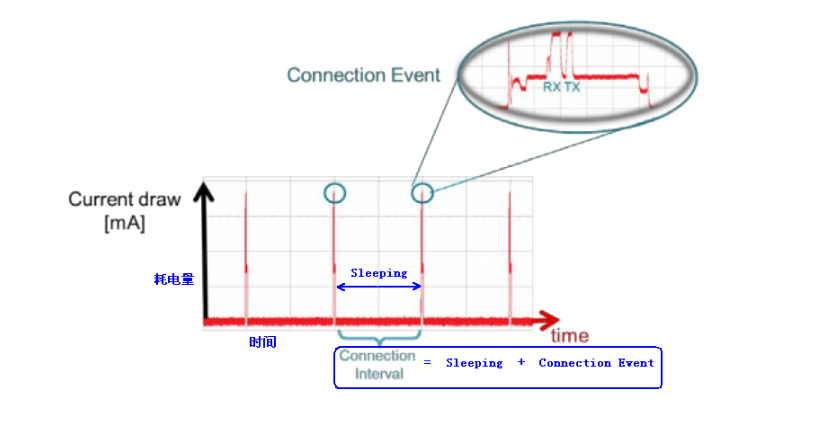
明白了为什么BLE功耗低的同时,我们也理解了为什么对数据量要求比较高时,我们不会使用BLE,因为大部分时候它都处于在"睡眠"状态。
1.3 RTL8723DS模块介绍
RTL8723DS是一款基于RTL8723DS芯片的SDIO接口单频单通道蓝牙WiFi二合一模块,主要用于智能家居、物联网设备和其他需要蓝牙和WiFi功能的嵌入式系统设计。 该WiFi模块提供SDIO接口以连接主机处理器,并为BT提供高速UART接口。它还具有PCM接口,用于音频数据传输,通过BT控制器直接连接到外部音频编解码器。采用1x1 802.11nb/g/nmimo技术,理论上WiFi吞吐量可达150Mbps。 蓝牙支持BT2.1+EDR/BT3.0和BT4.2,支持双模蓝牙,同时兼任BLE和SPP,满足不同开发需求。
2 WIFI & BT 模块在板卡的位置

3 WIFI & BT 连接性测试
3.1 设备树解析
提示
下文的文件路径:out/kernel/src_tmp/linux-5.10/arch/arm64/boot/dts/rockchip/ 需要先编译码源。
本板卡的WIFI和BT分别使用SDMMC2 外设和 UART8,下面我们来解析一下设备树文件:
基本定义层( rk3568.dtsi )
sdmmc2: dwmmc@fe000000 {
compatible = "rockchip,rk3568-dw-mshc",
"rockchip,rk3288-dw-mshc";
reg = <0x0 0xfe000000 0x0 0x4000>;
interrupts = <GIC_SPI 100 IRQ_TYPE_LEVEL_HIGH>;
max-frequency = <150000000>;
clocks = <&cru HCLK_SDMMC2>, <&cru CLK_SDMMC2>,
<&cru SCLK_SDMMC2_DRV>, <&cru SCLK_SDMMC2_SAMPLE>;
clock-names = "biu", "ciu", "ciu-drive", "ciu-sample";
fifo-depth = <0x100>;
resets = <&cru SRST_SDMMC2>;
reset-names = "reset";
status = "disabled";
};
........
uart8: serial@fe6c0000 {
compatible = "rockchip,rk3568-uart", "snps,dw-apb-uart";
reg = <0x0 0xfe6c0000 0x0 0x100>;
interrupts = <GIC_SPI 124 IRQ_TYPE_LEVEL_HIGH>;
clocks = <&cru SCLK_UART8>, <&cru PCLK_UART8>;
clock-names = "baudclk", "apb_pclk";
reg-shift = <2>;
reg-io-width = <4>;
dmas = <&dmac0 16>, <&dmac0 17>;
pinctrl-names = "default";
pinctrl-0 = <&uart8m0_xfer>;
status = "disabled";
};sdmmc2控制器 :地址 0xfe000000 ,支持最大频率150MHz,配置时钟、复位和FIFO深度uart8控制器 :地址 0xfe6c0000 ,用于蓝牙通信,支持DMA传输
sdmmc2 {
sdmmc2m0_bus4: sdmmc2m0-bus4 {
rockchip,pins =
/* sdmmc2_d0m0 */
<3 RK_PC6 3 &pcfg_pull_up_drv_level_2>,
/* sdmmc2_d1m0 */
<3 RK_PC7 3 &pcfg_pull_up_drv_level_2>,
/* sdmmc2_d2m0 */
<3 RK_PD0 3 &pcfg_pull_up_drv_level_2>,
/* sdmmc2_d3m0 */
<3 RK_PD1 3 &pcfg_pull_up_drv_level_2>;
};
sdmmc2m0_clk: sdmmc2m0-clk {
rockchip,pins =
/* sdmmc2_clkm0 */
<3 RK_PD3 3 &pcfg_pull_up_drv_level_2>;
};
sdmmc2m0_cmd: sdmmc2m0-cmd {
rockchip,pins =
/* sdmmc2_cmdm0 */
<3 RK_PD2 3 &pcfg_pull_up_drv_level_2>;
};
};
uart8 {
uart8m0_xfer: uart8m0-xfer {
rockchip,pins =
/* uart8_rxm0 */
<2 RK_PC6 2 &pcfg_pull_up>,
/* uart8_txm0 */
<2 RK_PC5 3 &pcfg_pull_up>;
};
uart8m0_rtsn: uart8m0-rtsn {
rockchip,pins =
/* uart8m0_rtsn */
<2 RK_PB1 3 &pcfg_pull_none>;
};
};sdio引脚 :GPIO3_PC6~PD3配置为SDIO功能,支持4位数据总线uart8引脚 :GPIO2_PC5/PC6用于TX/RX,GPIO2_PB1用于RTS控制
最后看板级配置层(截取自 rk3568-toybrick.dtsi 和 rk3568-toybrick-x0.dtsi )
//基础定义 (在 `rk3568-toybrick.dtsi` ):
sdio_pwrseq: sdio-pwrseq {
compatible = "mmc-pwrseq-simple"; // 简单MMC电源序列控制器
clocks = <&rk809 1>; // 使用RK809 PMIC的1号时钟输出
clock-names = "ext_clock"; // 外部时钟名称
pinctrl-names = "default"; // 引脚控制状态名
pinctrl-0 = <&wifi_enable_h>; // WiFi使能引脚配置
post-power-on-delay-ms = <200>; // 上电后延时200ms
reset-gpios = <&gpio3 RK_PD5 GPIO_ACTIVE_LOW>; // 复位GPIO,低电平有效
};
//板级覆盖配置 (在 `rk3568-toybrick-x0.dtsi` ):
&sdio_pwrseq {
post-power-on-delay-ms = <20>; // 缩短延时至20ms
status = "okay"; // 明确启用状态
};
......
wireless_wlan: wireless-wlan {
compatible = "wlan-platdata"; // WiFi平台数据兼容性
rockchip,grf = <&grf>; // 关联通用寄存器文件
wifi_chip_type = "rtl8723ds"; // 明确指定芯片型号
status = "okay"; // 启用状态
};
&wireless_wlan {
pinctrl-names = "default"; // 引脚控制状态
pinctrl-0 = <&wifi_host_wake_irq>; // 主机唤醒中断引脚
WIFI,host_wake_irq = <&gpio3 RK_PD4 GPIO_ACTIVE_HIGH>; // 主机唤醒中断GPIO
};
......
&wireless_bluetooth {
compatible = "bluetooth-platdata"; // 蓝牙平台数据兼容性
clocks = <&rk809 1>; // 使用RK809的1号时钟
clock-names = "ext_clock"; // 外部时钟名称
uart_rts_gpios = <&gpio2 RK_PB1 GPIO_ACTIVE_LOW>; // UART RTS控制GPIO
pinctrl-names = "default", "rts_gpio"; // 两种引脚状态:默认和RTS GPIO
pinctrl-0 = <&uart8m0_rtsn>; // 默认状态:UART8 RTS引脚
pinctrl-1 = <&uart8_gpios>; // RTS GPIO状态:GPIO模式
BT,reset_gpio = <&gpio3 RK_PA0 GPIO_ACTIVE_HIGH>; // 蓝牙复位GPIO
BT,wake_gpio = <&gpio3 RK_PA2 GPIO_ACTIVE_HIGH>; // 蓝牙唤醒GPIO
BT,wake_host_irq = <&gpio3 RK_PA1 GPIO_ACTIVE_HIGH>; // 蓝牙唤醒主机中断
status = "okay"; // 启用状态
};
......
&sdmmc2 {
max-frequency = <150000000>; // 最大工作频率150MHz
supports-sdio; // 支持SDIO协议
bus-width = <4>; // 4位数据总线宽度
disable-wp; // 禁用写保护检测
cap-sd-highspeed; // 支持SD高速模式
cap-sdio-irq; // 支持SDIO中断
keep-power-in-suspend; // 休眠时保持供电
mmc-pwrseq = <&sdio_pwrseq>; // 关联电源序列控制器
non-removable; // 不可移除设备
pinctrl-names = "default"; // 引脚控制状态
pinctrl-0 = <&sdmmc2m0_bus4 &sdmmc2m0_cmd &sdmmc2m0_clk>; // 引脚复用配置
sd-uhs-sdr104; // 支持UHS-I SDR104模式
status = "okay"; // 启用状态
};
......
&uart8 {
status = "okay"; // 启用UART8
pinctrl-names = "default"; // 引脚控制状态
pinctrl-0 = <&uart8m0_xfer &uart8m0_ctsn>; // TX/RX和CTS引脚配置
};由于篇幅过长,下面对几个关键节点进行说明:
mmc-pwrseq: 将WiFi模块与SDMMC2接口绑定的关键属性cap-sdio-irq: 启用SDIO中断支持,提高数据传输效率keep-power-in-suspend: 确保休眠时WiFi模块保持供电,支持唤醒功能non-removable: 标识为板载固定设备,不支持热插拔sd-uhs-sdr104: 支持高速传输模式,最大传输速率104MB/suart_rts_gpios: 蓝牙UART流控制信号,确保数据传输可靠性- 双引脚状态管理 : 通过
pinctrl-0和pinctrl-1实现UART和GPIO模式切换
3.2 WIFI & BT连接测试方法
由于目前版本下的Linux内核并没有预装WIFI 和 蓝牙的测试命令,所以我们直接使用出厂自带的系统进行测试。
BLE如果可以配对成功的话,就可以验证通信了,因为配对过程本身就是一种特定形式的通信,并且配对成功是成功建立通信链路(即连接)的先决条件。
但是WIFi连接成功只能代表设备和路由器等设备之间建立了逻辑链路,但不能确保连接成功,还需要进行网络测试,比如打开网页,使用ping命令等。
3.3 WIFI & BT连接测试具体演示
连接好天线后,接上电源进入系统:
(注意,随着软件更新,进入系统后的界面可能会有所不同)
BLE测试
我使用的手机蓝牙与开发板进行配对,在设置中找到对方设备进行配对。点击连接,安卓手机和鸿蒙会各种弹出确认配对码请求,在两个设备上分别点击配对即可:
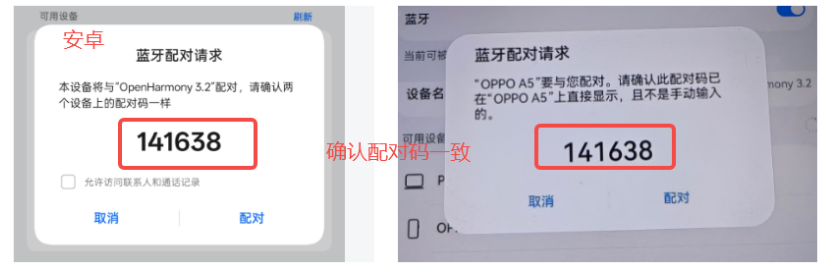
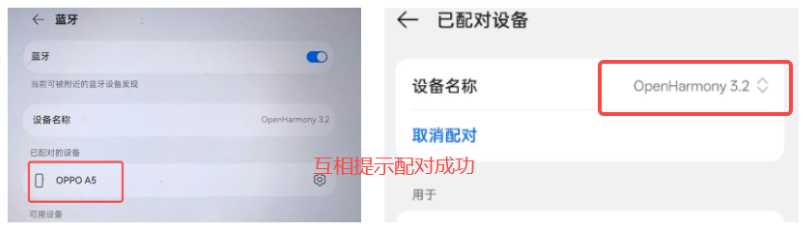
配对成功,蓝牙测试正常。
WiFi连接测试
使用板卡连接手机热点"OPPOA5"进行测试,连接成功以后,在设置中可以看到连接信息:

我们打开浏览器,测试网络是否正常:

成功访问微博,网络连接正常。
4 WIFI & BT 使用---官方库方式
资料路径
hap包:\05-开发资料\01-OpenHarmory 开发资料\外设测试APP\HAP\NET_TEST.hap
码源:\05-开发资料\01-OpenHarmory 开发资料\外设测试APP\SRC\NATEWORK_TEST
详见:以太网测试