02 开发环境的搭建
在当前阶段,大部分的OpenHarmony开发板还不支持在Windows环境下进行编译码源,对于个人开发者或者学生朋友,通常是通过VMware搭建一个本地Linux虚拟机如Ubuntu来进行编译。对于公司开发人员或者家里有条件的大佬自有服务器的话就不需要虚拟机环境了,但对应的操作是完全一样的,只是编译速度不同。
使用DevEco Device Tool 本质是搭建一个Windows+Ubuntu混合开发的环境,其中使用Windows平台的DevEco Device Tool可视化界面进行相关操作,通过远程连接的方式对接Ubuntu下的DevEco Device Tool(Ubuntu下可以不安装Visual Studio Code),然后对Ubuntu下的源码进行开发、编译、烧录等操作。
1 下载开发工具
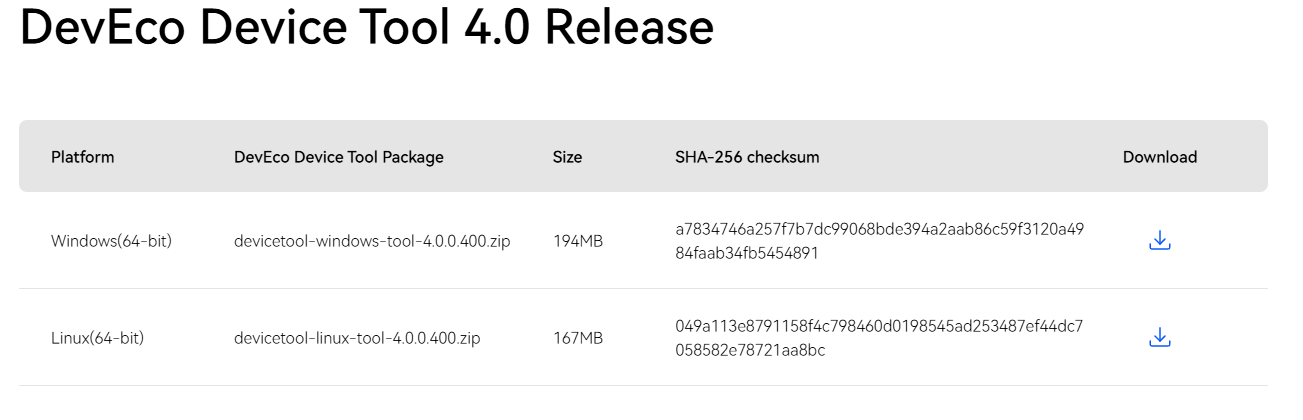
我们首先下载windows和Linux环境下的DevEco Device Tool安装包
下载地址:华为集成开发环境IDE DevEco Device Tool下载 | HarmonyOS设备开发
2 搭建Linux环境
以Ubuntu20.04 版本为例
(如果还未安装虚拟机,请参考安装虚拟机教程:Ubuntu20.04安装指南及初步环境配置(超级详细)包含[ROS Noetic、Terminator、Pycahrm等常用工具安装]_mt6701网卡 乌班图-CSDN博客)
Linux与windows互传文件,推荐常用的Mobextern免费远程工具,功能及其强大,由于本文主要是面向DevEco Device Tool工具的环境搭建,详细使用请参考MobaXterm详细使用教程_mobaxterm使用教程-CSDN博客)
配置好虚拟机环境且可以与Windows互传文件以后,执行下文操作:
2.1 确认shell环境
- 执行如下命令,确认输出结果为bash。
ls -l /bin/sh
如果输出结果不是bash,请打开终端工具,执行如下命令,输入密码,然后选择No,将Ubuntu shell由dash修改为bash。
sudo dpkg-reconfigure dash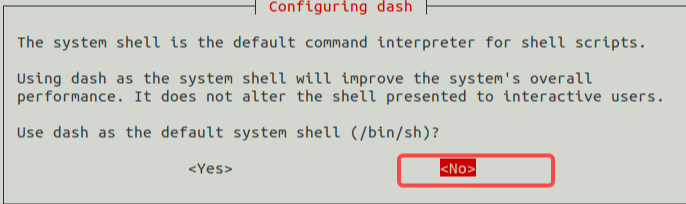
2.2 安装DevEco Device Tool
- 将devicetool-linux-tool-4.0.0.400.zip文件放在Linux下个人存放软件工具包的目录下,使用解压指令:
unzip devicetool-linux-tool-{Version}.zip
# {Version}为对应的版本号,如我这里输入:unzip devicetool-linux-tool-4.0.0.400.zip
- 进入解压后的文件夹,执行如下命令,赋予安装文件可执行权限,其中devicetool-linux-tool-{Version}.sh请根据实际进行修改。
chmod u+x devicetool-linux-tool-{Version}.sh- 执行如下命令,安装DevEco Device Tool,其中devicetool-linux-tool-{Version}.sh请根据实际进行修改。
sudo ./devicetool-linux-tool-{Version}.sh- 在用户协议和隐私声明签署界面,请详细阅读用户协议和隐私声明,需签署同意用户协议和隐私声明才能进行下一步的安装,可通过键盘的上下按键进行选择。
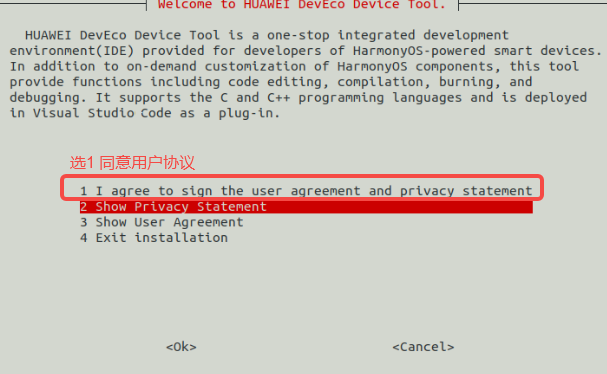
- 安装完成后,当界面输出"DevEco Device Tool successfully installed."时,表示DevEco Device Tool安装成功。

3 搭建Windows环境
下载DevEco Device Tool最新Windows版本软件包。
解压DevEco Device Tool压缩包,双击安装包程序,单击下一步进行安装。
请查阅用户协议和隐私声明,需勾选"我接受许可证协议中的条款"后,才能继续下一步的安装。
设置DevEco Device Tool的安装路径,请注意安装路径不能包含中文字符,不建议安装到C盘目录,单击下一步。

- 根据安装向导提示,安装依赖的工具。
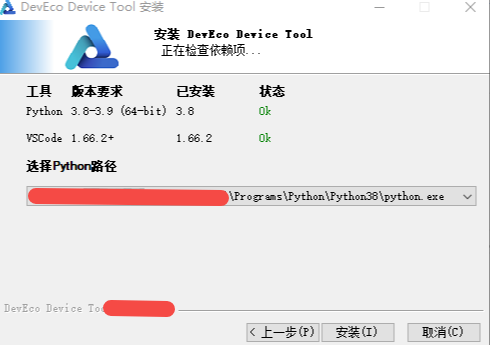
- 安装:按照默认路径及参数直接安装。
- 自定义安装:安装前可以自行修改安装路径及其他设置参数。
安装完成后,各软件状态显示为OK。

依赖的工具安装完成后,单击安装,开始安装DevEco Device Tool。
继续等待DevEco Device Tool安装向导自动安装DevEco Device Tool插件,直至安装完成,单击完成,关闭DevEco Device Tool安装向导。
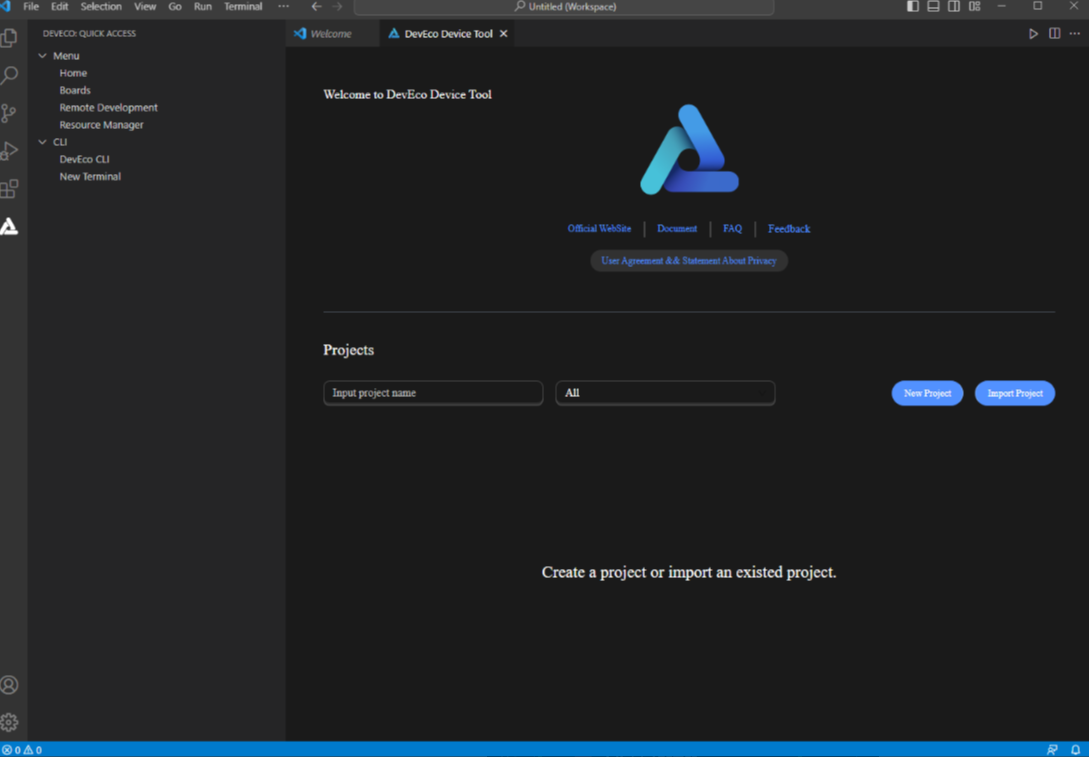
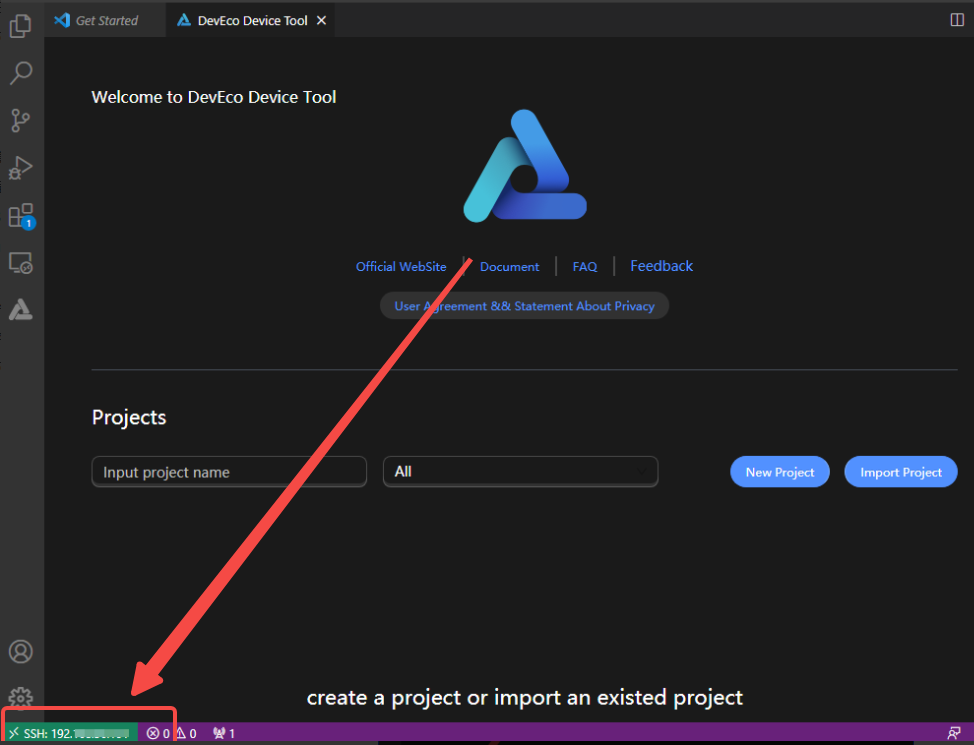
打开Visual Studio Code,进入DevEco Device Tool工具界面。至此,DevEco Device Tool Windows开发环境安装完成。
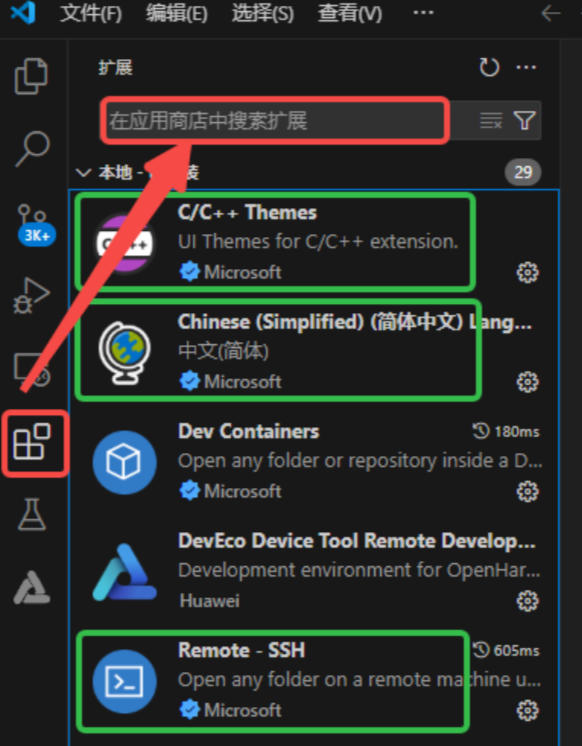
- 进入Visual Studio Code以后,点击拓展(或按Ctrl+Shift+X),在搜索下面标记的三款插件,进行安装后重启。
4 配置Windows远程访问Ubuntu环境
4.1 Ubuntu安装SSH并获取IP地址
- 在Ubuntu系统中,打开终端工具,执行如下命令安装、启动SSH服务
sudo apt-get install openssh-server
sudo systemctl start ssh- 执行如下命令,获取当前用户的IP地址,用于Windows系统远程访问Ubuntu环境。
ifconfig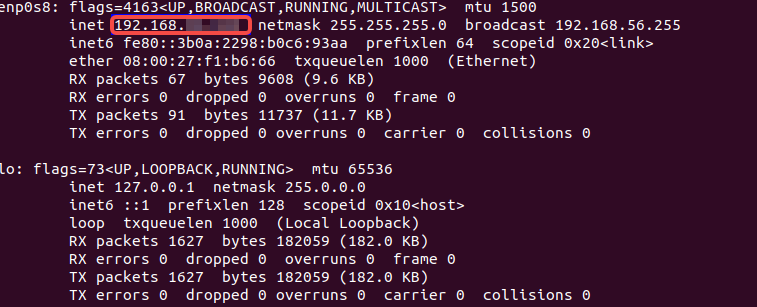
说明
如果执行ifconfig命令提示"command-not-found",请执行sudo apt-get install net-tools命令安装网络查询工具,然后重新查询IP地址。
4.2 远程连接Ubuntu
- 打开Windows系统的Visual Studio Code,点击左侧小电视图标,在SSH TARGETS下,单击+。
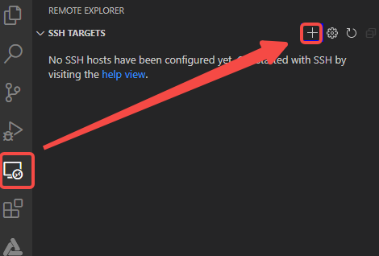
- 在弹出的SSH连接命令输入框中输入"ssh username@ip_address",其中ip_address为要连接的远程计算机的IP地址,username为登录远程计算机的帐号(比如我这里为ohos)。

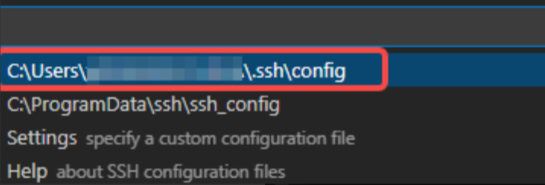
- 在弹出的输入框中,选择SSH configuration文件,选择默认的第一选项即可。
- 在SSH TARGETS中,找到远程计算机再点击右侧文件夹图标,打开远程计算机。

- 首次连接时,在弹出的输入框中选择Linux,然后再选择Continue,然后输入登录远程计算机的密码,连接远程计算机。

至此,环境搭建完成。
 -->-->
-->-->