04 设备开发快速上手
为了方便开发者快速上手 M4R1 的设备开发,本教程将讲述如何通过我们针对 M4R1 设备开发环境制作的 VM 镜像文件快速构建开发环境,进行设备开发。
提示
相关资料均已上传至百度云盘,开发者可通过 资料下载 里面的下载链接跳转至百度网盘下载
0 前言
因所制作的 VM 镜像文件和编译源码所需虚拟机硬盘空间极大,所以推荐预留400-500G硬盘空间
1 VM 镜像文件获取
1)百度网盘提供 M4R1_VMIMAGE_OH5.0_V1.0.zip 为 VM 镜像文件的压缩包,下载压缩包
因包含ubuntu系统和相关开发环境依赖,故该VM镜像文件较大,大约46G,请准备好足够的空间下载
备注
DevEco Studio 安装包路径:
05-开发资料>01-OpenHarmory 开发资料>VM镜像文件>M4R1_VMIMAGE_OH5.0_V1.0.zip
2)下载完成后,解压压缩包,如硬盘空间不太充足,可解压后删除压缩包。
解压后内部文件共包含 mf文件,ovf文件,vmdk文件
2 导入 ovf 文件到 VM
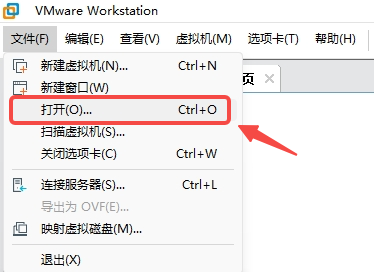
1)打开 VM ,选择菜单栏中的【文件 -> 打开】。
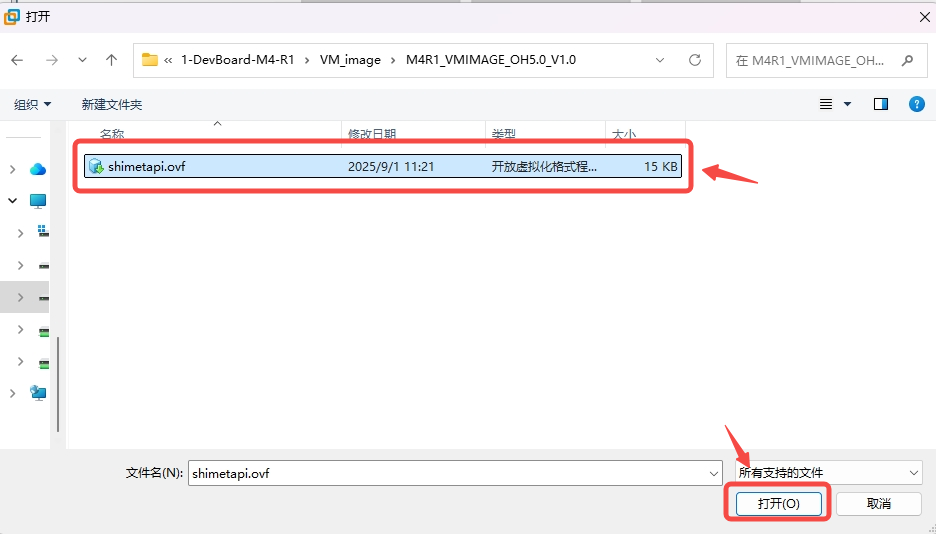
2)在弹出的窗口中,找到刚刚解压的文件夹,并选中其中的ovf文件,点击【打开】。
3)在新弹出的窗口【导入虚拟机】中,填入新虚拟机名称并选择存储路径,完成后点击【导入】。
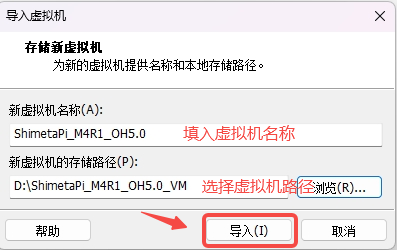
注意
存储路径推荐300GB以上,如需镜像进行其他操作,则需要扩充更多空间
4)完成上述操作后,会显示正在导入,等待导入完成即可。
注意
为了确保开发者能够安装完成,VM 镜像文件预留虚拟机磁盘为大小为200G,为编译源码极限磁盘大小,小于此大小可能会编译失败。
存储磁盘空间推荐300GB以上,扩展VM空间的方法可在网上中搜索
后续我们将会推出默认磁盘空间为300GB的VM镜像压缩包作为默认镜像
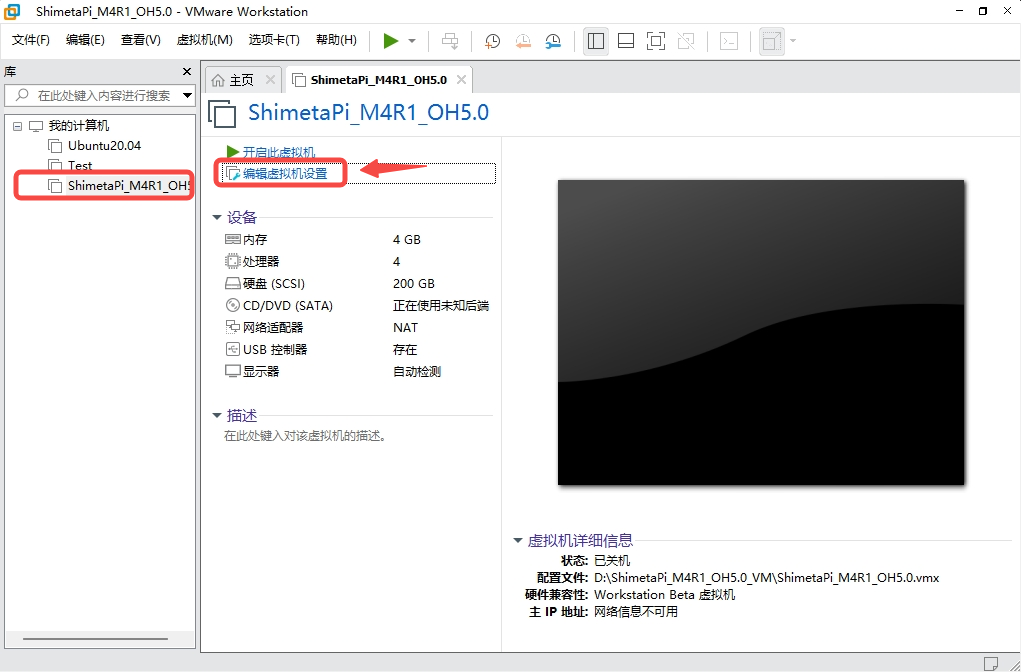
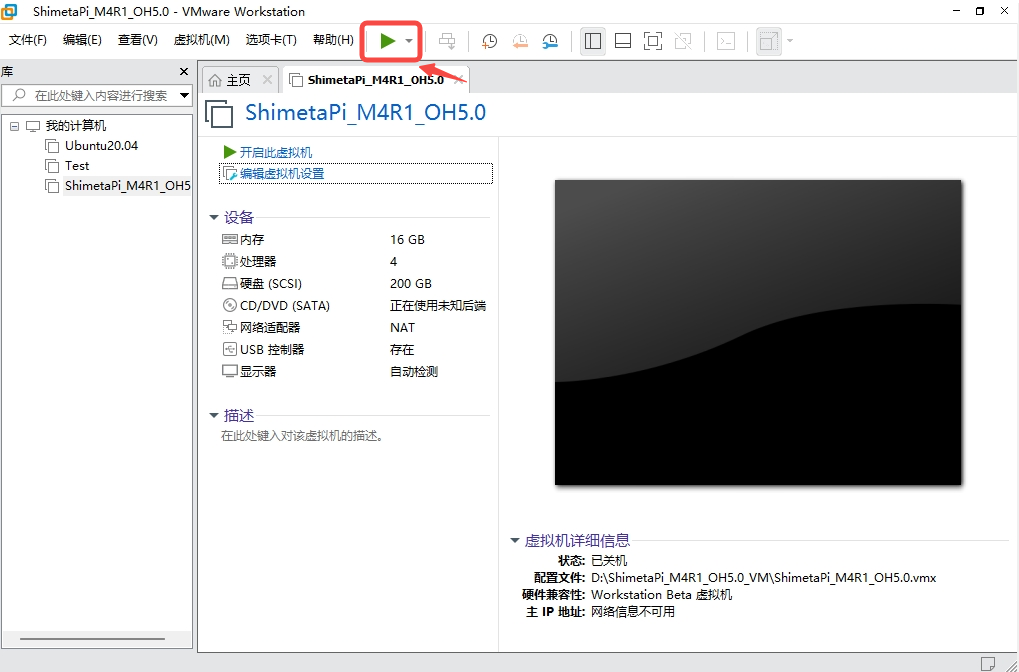
5)导入完成后,可以看到基本设置,点击【编辑虚拟机设置】,对设置进行修改
6)调整内存大小为16GB,如图所示,点击【16GB】,看到此虚拟机内存为:16384MB 后,点击【确认】。
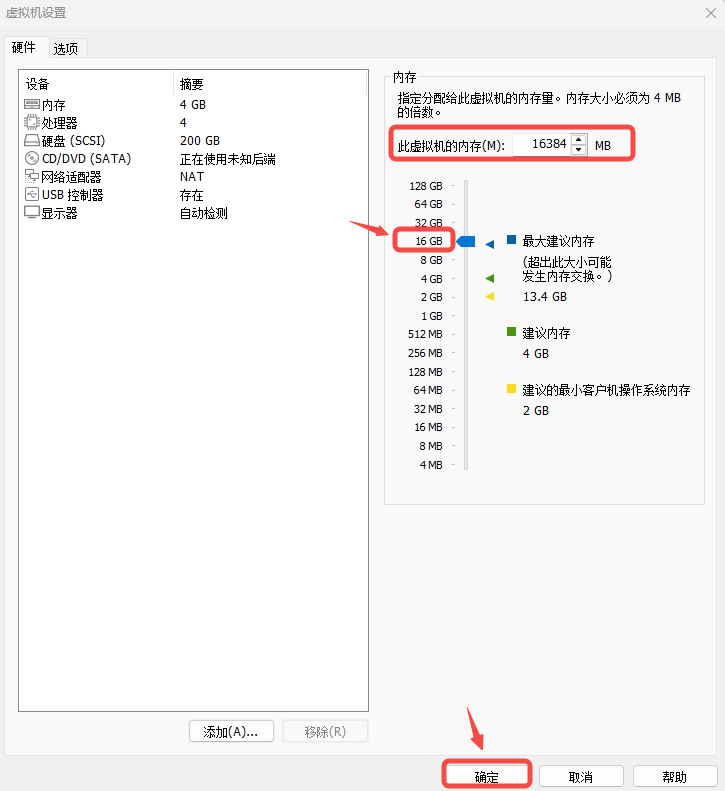
可以看到虚拟机内存设置显示为16GB

注意
解压和编译时间与内存和线程数有关,如需性能释放更好,编译和解压时间更快,需要提高内存和增加虚拟机的核心线程数
3 解压源码
1)点击 VM 界面的绿色播放按键,启动虚拟机
等待虚拟机启动,当显示下面登录界面表示虚拟机启动成功
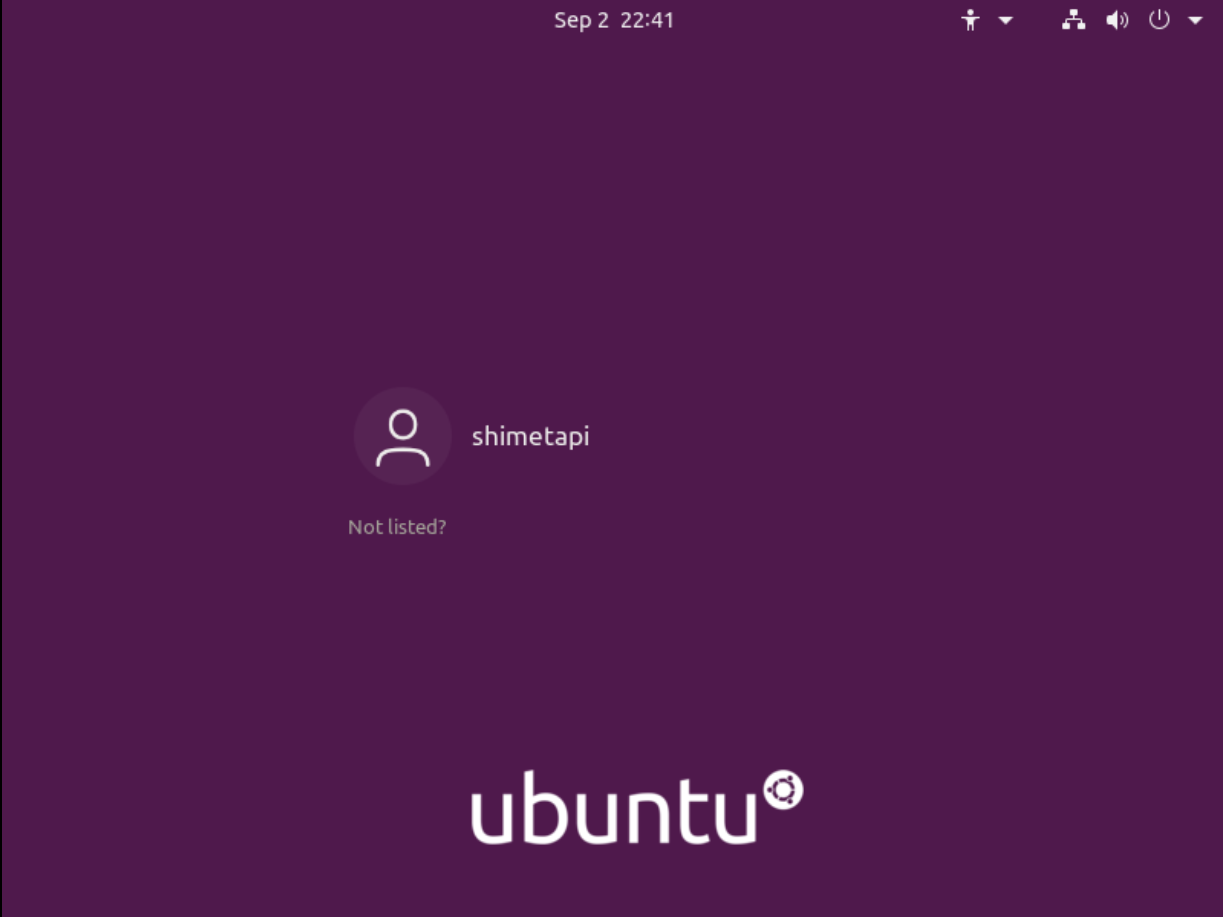
点击用户,出现密码输入框,在密码输入框输入密码即可进入ubuntu桌面
账户信息
用户名: shimetapi
默认密码:123456
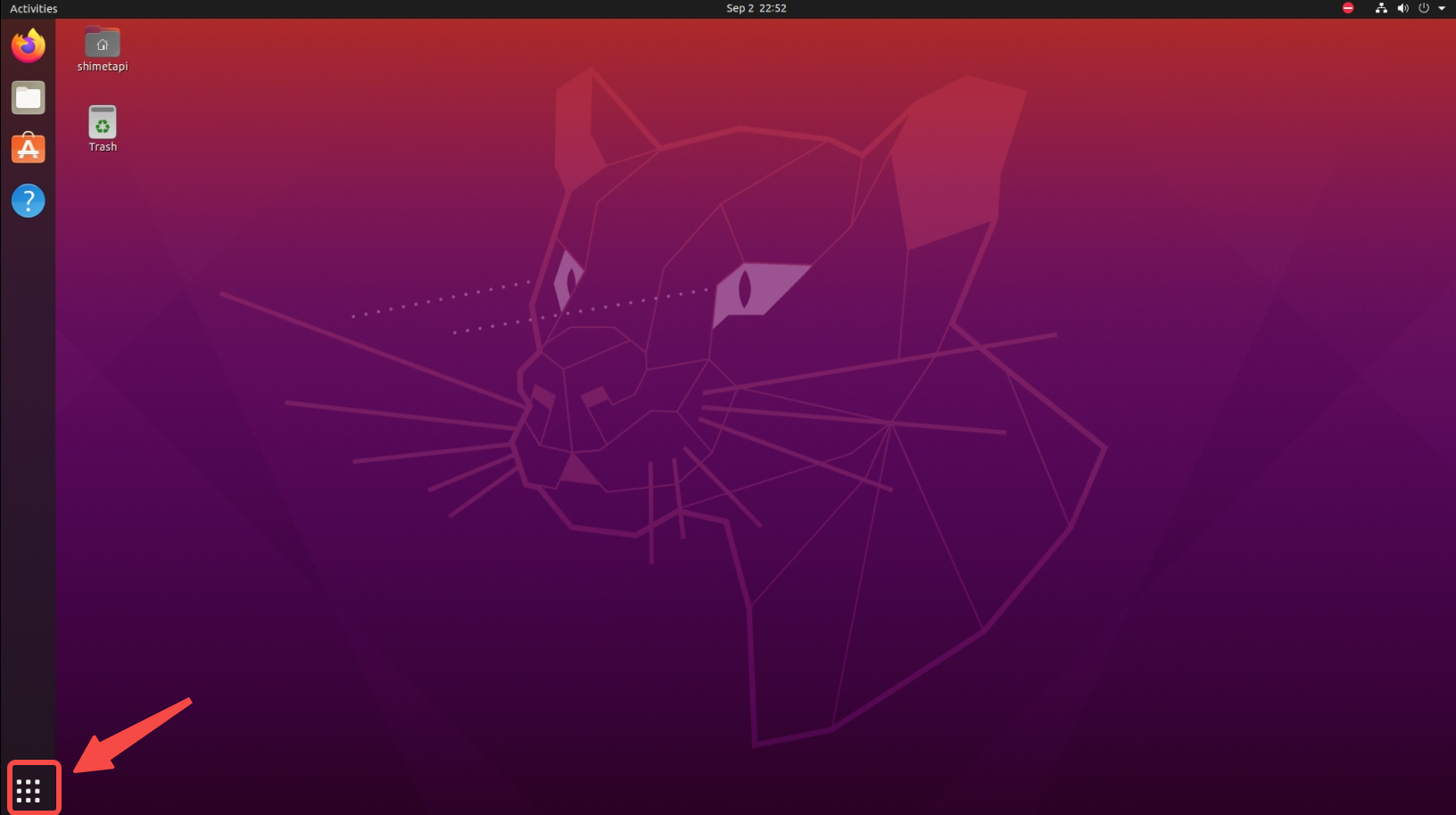
2)点击下面的九个小圆点,进入界面后选择【Terminal】,进入终端
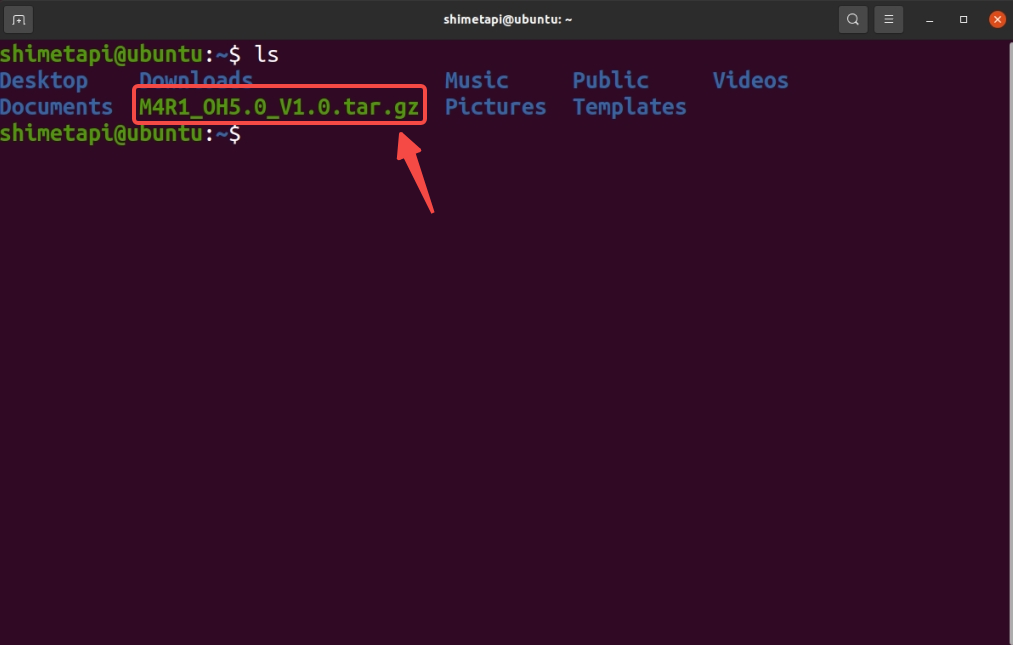
3)进入终端后输入下面指令检查是否存在源码压缩包
ls如下图所示,如果有 M4R1_OH5.0_V1.0.tar.gz 即存在源码压缩包。
4) 输入下面指令解压压缩包
tar -zxvf M4R1_OH5.0_V1.0.tar.gz等待解压完成。
4 编译源码
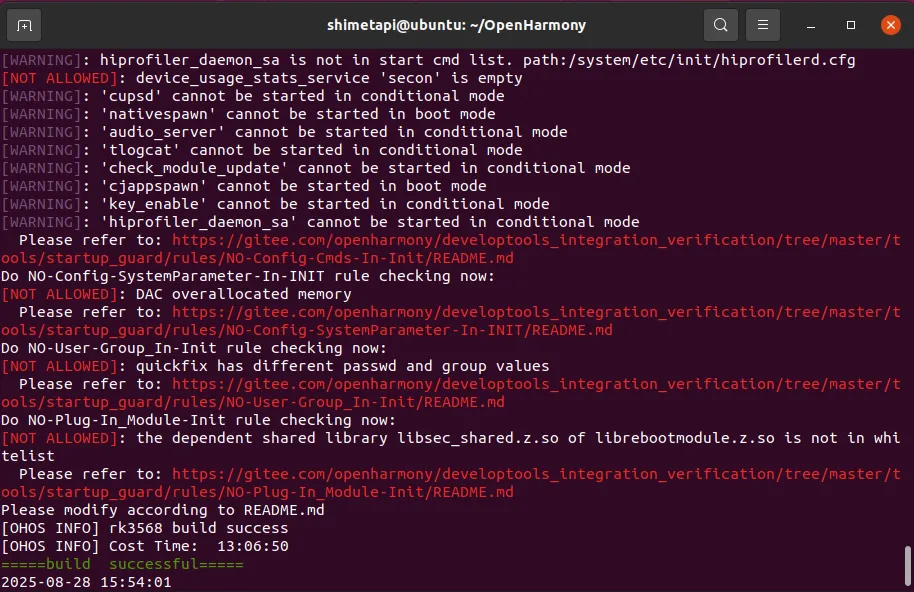
解压完成后输入下面指令,开始编译源码
cd OpenHarmony
./build.sh --product-name rk3568 --ccache编译完成如图显示下面信息,会显示编译时间,由于案例用最低要求配置编译,所以编译时间很长。
5 打包固件
源码编译完成后,输入下面指令,打包固件
./build_package.sh