08 SPI通信
1 SPI介绍
SPI(serial peripheral interface)的基本概念参考博客:CSDN博客文章
相比于I2C通信,SPI通信讲究的就是简单粗暴,需要什么信号就加上一根线,连片信号都有专门的信号线负责,带来的好处也非常明显。由于信号是直接驱动而不是类似与I2C这种上拉信号线输出高电平来防止烧毁器件的,所以通信速率相比于I2C可以做的很高。本文档板子使用的RK3568在主机模式下最大理论速率可以达到50MHz,从机模式下达到33MHz。
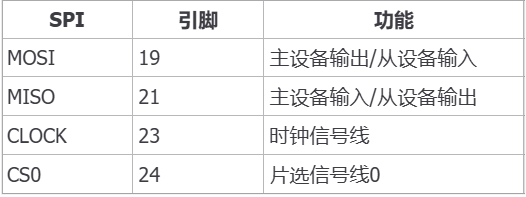
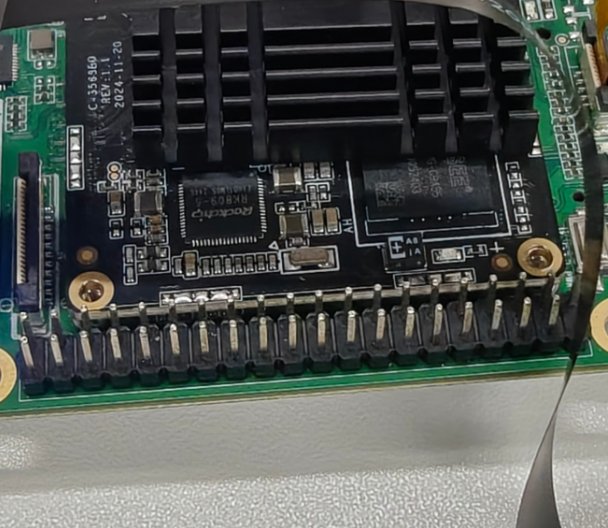
2 SPI板卡接口
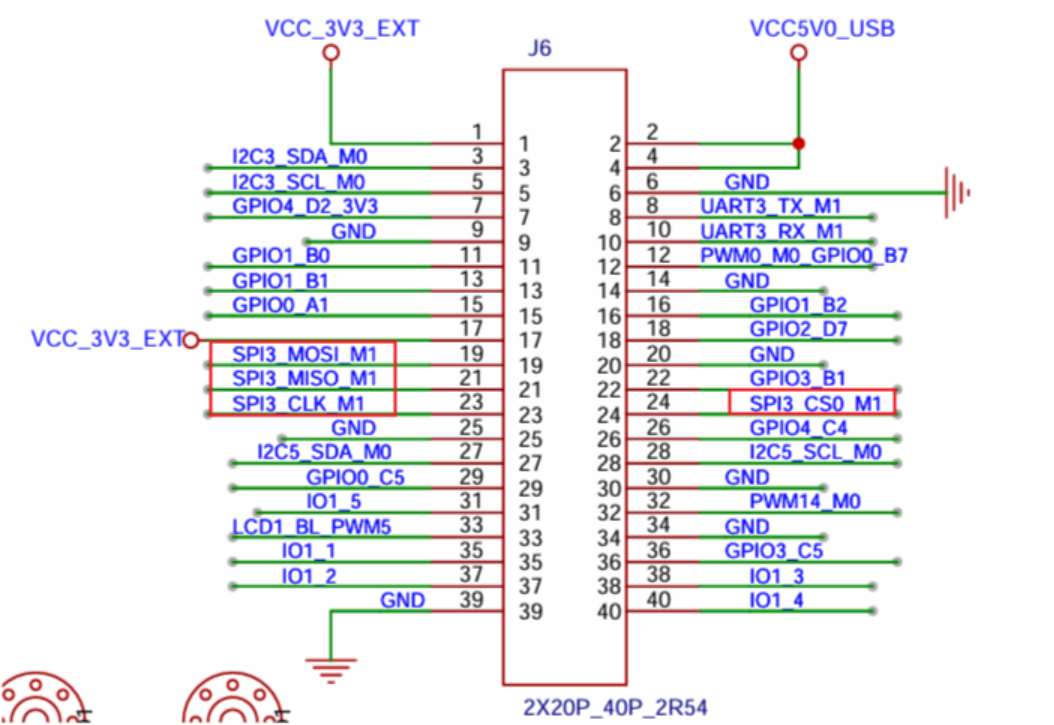
板子引出的SPI引脚为SPI3。
3 SPI使用---命令行方法
3-1 设备树解析
提示
下文的文件路径:out/kernel/src_tmp/linux-5.10/arch/arm64/boot/dts/rockchip/需要先编译码源。
同上一小节,我们先在 rk3568.dtsi 文件中,SPI3控制器的基础定义如下:
spi3: spi@fe640000 {
compatible = "rockchip,rk3066-spi";
reg = <0x0 0xfe640000 0x0 0x1000>;
interrupts = <GIC_SPI 106 IRQ_TYPE_LEVEL_HIGH>;
#address-cells = <1>;
#size-cells = <0>;
clocks = <&cru CLK_SPI3>, <&cru PCLK_SPI3>;
clock-names = "spiclk", "apb_pclk";
dmas = <&dmac0 26>, <&dmac0 27>;
dma-names = "tx", "rx";
pinctrl-names = "default", "high_speed";
pinctrl-0 = <&spi3m0_cs0 &spi3m0_cs1 &spi3m0_pins>;
pinctrl-1 = <&spi3m0_cs0 &spi3m0_cs1 &spi3m0_pins_hs>;
status = "disabled";
};关键属性解析:
compatible: 指定SPI控制器兼容性为"rockchip,rk3066-spi"reg: SPI3控制器寄存器基地址为0xfe640000,大小为4KBinterrupts: 中断号为106,高电平触发clocks: 配置SPI时钟和APB时钟dmas: DMA通道配置,支持发送和接收pinctrl-0: 默认引脚复用配置(使用m0模式)status: 默认状态为"disabled"(禁用)
再查看pinctrl子系统中,查看SPI3的引脚复用配置,在 rk3568-pinctrl.dtsi 文件中:
SPI3 M1模式引脚配置(SDK代码中使用的模式):
spi3m1_pins: spi3m1-pins {
rockchip,pins =
/* spi3_clkm1 */
<4 RK_PC2 2 &pcfg_pull_none>,
/* spi3_misom1 */
<4 RK_PC5 2 &pcfg_pull_none>,
/* spi3_mosim1 */
<4 RK_PC3 2 &pcfg_pull_none>;
};
spi3m1_cs0: spi3m1-cs0 {
rockchip,pins =
/* spi3_cs0m1 */
<4 RK_PC6 2 &pcfg_pull_none>;
};
spi3m1_pins_hs: spi3m1-pins {
rockchip,pins =
/* spi3_clkm1 */
<4 RK_PC2 2 &pcfg_pull_up_drv_level_1>,
/* spi3_misom1 */
<4 RK_PC5 2 &pcfg_pull_up_drv_level_1>,
/* spi3_mosim1 */
<4 RK_PC3 2 &pcfg_pull_up_drv_level_1>;
};引脚分配:
CLK(时钟线) : GPIO4_PC2,功能复用模式2MISO(主入从出) : GPIO4_PC5,功能复用模式2MOSI(主出从入) : GPIO4_PC3,功能复用模式2CS0(片选0) : GPIO4_PC6,功能复用模式2
最后查看一下板级文件中对SPI3的具体配置情况:
&spi3 {
status = "okay";
pinctrl-0 = <&spi3m1_cs0 &spi3m1_pins>;
pinctrl-1 = <&spi3m1_cs0 &spi3m1_pins_hs>;
spidev:spidev@0 {
compatible = "rockchip,spidev";
reg = <0>;
spi-max-frequency = <10000000>;
status = "okay";
};
};对以上设备树进行一个简单的介绍:
引脚复用配置
pinctrl-0: 默认速度模式的引脚配置(使用m1模式)pinctrl-1: 高速模式的引脚配置(增强驱动能力)
spidev设备配置
compatible= "rockchip,spidev" : 使用Rockchip的通用SPI设备驱动reg= <0> : 设备地址为0(对应CS0片选)spi-max-frequency= <10000000> : 最大SPI时钟频率为10MHz
3-2 应用层操作SPI的方法
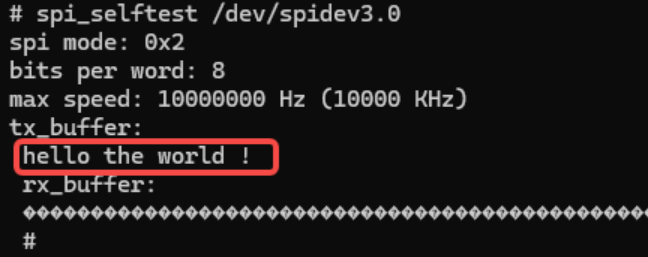
提供的SDK中,已经在rk3568平台写好了一个SPI测试程序 spi_selftest,主机发送"hello the world !",短接MOSI和MISO,输入端接收数据查看是否正常。帮助开发者验证 SPI 控制器的驱动是否正常工作、硬件连接是否正确,只需要输入目标spi设备即可执行下列指令即可运行:
spi_selftest /dev/spidevxx3-3 具体功能演示
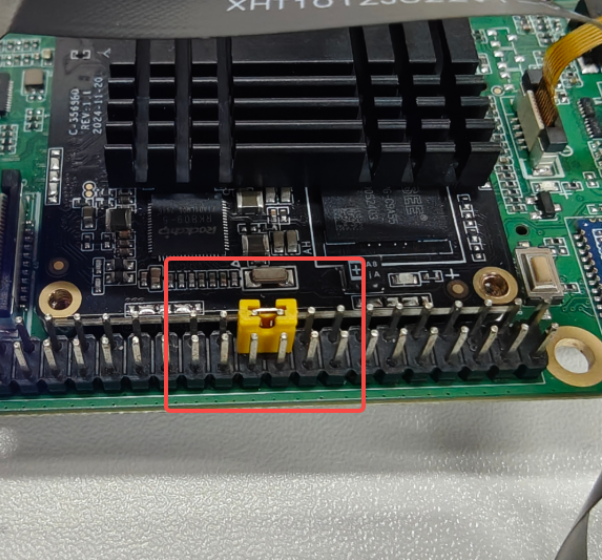
现在通过上述指令对板子挂载的SPI3进行测试:
首先短接板子上的MOSI和MISO接口:
在终端输入:spi_selftest /dev/spidev3.0 测试数据收发是否正常:
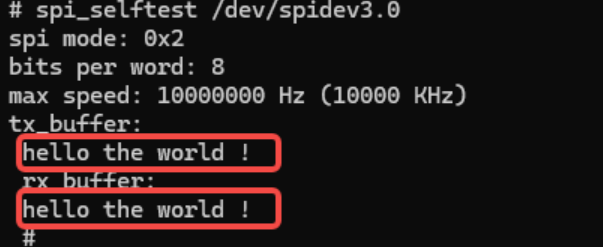
成功接收到发送的字节:
将短接跳线帽拔掉,再输入 spi_selftest /dev/spidev3.0 指令进行测试:
此时接收值为乱码,符合预期。
4 SPI使用---NAPI方法
资料路径
hap包:\05-开发资料\01-OpenHarmory 开发资料\外设测试APP\HAP\SPI_TEST.hap
工程码源:\05-开发资料\01-OpenHarmory 开发资料\外设测试APP\SRC\SPI_TEST
同上小节命令行,我们使用的测试指令为 spi_selftest /dev/spidev3.0
4-1 测试环境准备
首先我们需要通过hdc工具连接到开发板,给要操作的系统节点加上可读写权限:
mount -o remount,rw /
chmod 777 /system/bin/spi_selftest
chmod 777 /dev/spidev3.0由于 system 是系统文件,一般是只读,需要先把根目录 / 权限改为可读写以后,才能把测试命令所在的目录 /system/bin/spi_selftest 和SPI设备目录 /dev/spidev3.0 权限改为777。
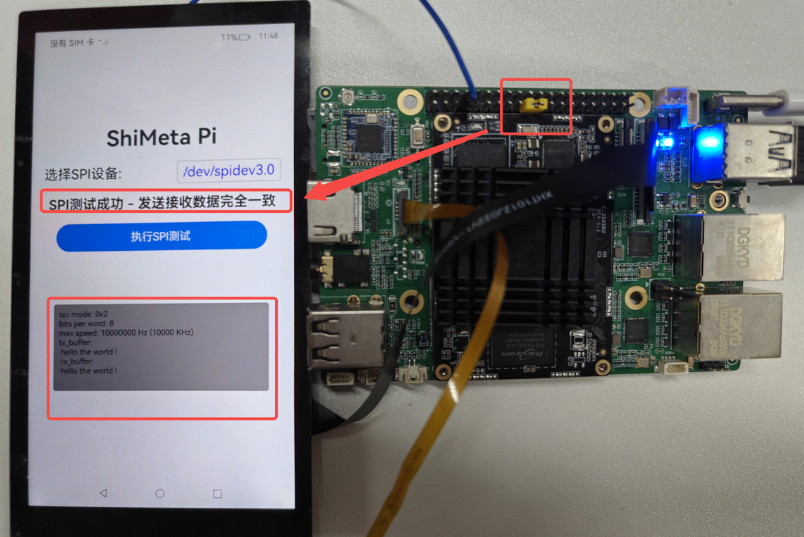
4-2 SPI设备测试APP使用介绍
下面对使用NAPI创建的SPI设备测试APP进行介绍:
进入程序以后,有一个下拉框可以对SPI设备进行选择
(板卡只引出了 spidev3.0,所以这里使用选择 /dev/spidev3.0 进行测试):
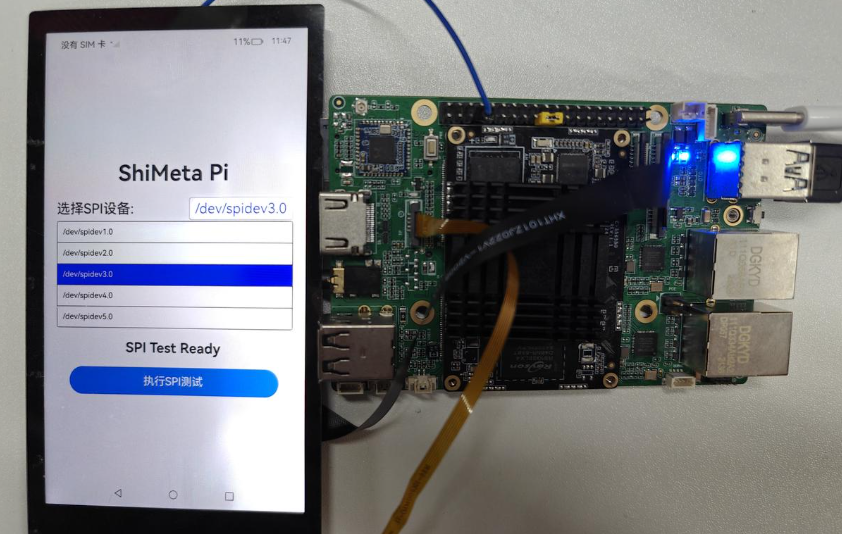
点击SPI测试按键:
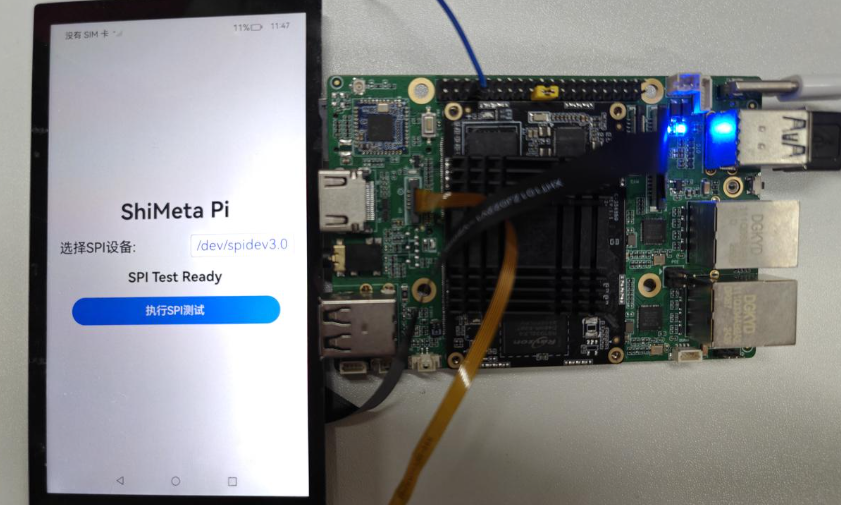
如果将SPI的MOSI和MISO进行短接,下方会打印接收到的终端数据,发送和接收一致则打印SPI设备测试成功:
对应的,将SPI的MOSI和MISO进行跳线帽拔下,下方会打印接收到的终端数据,接收显示乱码,提示SPI设备测试不通过:

4-3 NAPI底层C函数介绍
考虑到大部分朋友可能没有很好的Linux系统编程基础,这里对实现NAPI的底层C函数进行一个简单的讲解,先附上源码:
// 执行SPI自测试命令
static napi_value SPI_Test(napi_env env, napi_callback_info info)
{
size_t argc = 1;
napi_value args[1];
napi_get_cb_info(env, info, &argc, args, nullptr, nullptr);
if (argc < 1) {
napi_throw_error(env, nullptr, "Expected 1 argument: SPI device path (e.g., /dev/spidev3.0)");
return nullptr;
}
// 获取SPI设备路径参数
size_t str_size;
napi_get_value_string_utf8(env, args[0], nullptr, 0, &str_size);
char* spi_device = (char*)malloc(str_size + 1);
napi_get_value_string_utf8(env, args[0], spi_device, str_size + 1, &str_size);
OH_LOG_Print(LOG_APP, LOG_INFO, GLOBAL_RESMGR, SPI_TAG,
"Starting SPI test for device: %{public}s", spi_device);
// 创建管道用于读取命令输出
int pipefd[2];
if (pipe(pipefd) == -1) {
OH_LOG_Print(LOG_APP, LOG_ERROR, GLOBAL_RESMGR, SPI_TAG,
"Failed to create pipe: %{public}s", strerror(errno));
free(spi_device);
napi_throw_error(env, nullptr, "Failed to create pipe");
return nullptr;
}
pid_t pid = fork();
if (pid == -1) {
OH_LOG_Print(LOG_APP, LOG_ERROR, GLOBAL_RESMGR, SPI_TAG,
"Failed to fork process: %{public}s", strerror(errno));
close(pipefd[0]);
close(pipefd[1]);
free(spi_device);
napi_throw_error(env, nullptr, "Failed to fork process");
return nullptr;
}
if (pid == 0) {
// 子进程:执行spi_selftest命令
close(pipefd[0]); // 关闭读端
dup2(pipefd[1], STDOUT_FILENO); // 重定向stdout到管道(写入的数据传入标准输出(fd=1))
dup2(pipefd[1], STDERR_FILENO); // 重定向stderr到管道(写入的数据传入标准错误(fd=2))
close(pipefd[1]);
// 执行spi_selftest命令.如果成功不会返回,失败了才会执行后续的操作
execl("/system/bin/spi_selftest", "spi_selftest", spi_device, (char*)NULL);
// 如果execl失败,输出错误信息
fprintf(stderr, "Failed to execute spi_selftest: %s\n", strerror(errno));
exit(1);
} else {
// 父进程:读取命令输出
close(pipefd[1]); // 关闭写端
// 读取输出
char buffer[4096] = {0};
ssize_t total_read = 0;
ssize_t bytes_read;
while ((bytes_read = read(pipefd[0], buffer + total_read, sizeof(buffer) - total_read - 1)) > 0) {
total_read += bytes_read;
if (total_read >= sizeof(buffer) - 1) {
break;
}
}
close(pipefd[0]);
// 等待子进程结束
int status;
waitpid(pid, &status, 0);
buffer[total_read] = '\0';
OH_LOG_Print(LOG_APP, LOG_INFO, GLOBAL_RESMGR, SPI_TAG,
"SPI test output: %{public}s", buffer);
free(spi_device);
// 返回命令输出结果
napi_value result;
napi_create_string_utf8(env, buffer, NAPI_AUTO_LENGTH, &result);
return result;
}
}为了成功捕获完整的输出,我们这里设计了一个子进程用于执行测试命令,另一个进程(父进程)只需要负责读取子进程的输出,提高系统的实时性也防止一个进程"自发自收"导致数据丢失或程序异常。
程序详解
下面对程序进行详解:
- 首先调用函数
napi_get_cb_info获取JavaScript端传入的参数,也就是设备路径 - 使用2次函数
napi_get_value_string_utf8获取到接收字符串的长度后转为C字符串 int pipefd[2];创建的是父子进程之间通信的管道,pipefd[0]用于读取,pipefd[1]用于写入- 使用
fork()创建子进程,子进程pid==0,父进程pid>0 - 子进程函数负责写指令,通过
dup2把需要写入的数据分别重定向传输到标准输出STDOUT_FILENO(fd==1)和标准错误STDERR_FILENO(fd==2);再使用函数execl("/system/bin/spi_selftest", "spi_selftest", spi_device, (char*)NULL);在指定路径下执行SPI测试命令,需要了解的是,这个函数执行时,会再开一个进程专门跑这个任务,成功后就不会返回了! - 父进程循环读取数据并把内容保存到缓冲区中,
read()会返回读取的字节数,如果大于0表示成功读取了数据,当子进程关闭写端后,read()会返回0,循环结束 - 等待子程序结束后把读取的数据转成JavaScript字符串返回
其余部分代码大家可以参考提供的源码!