40pin IO开发
实验05——串口输出
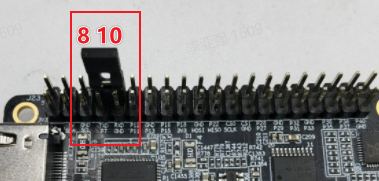
硬件连接
回环测试: 把 TXD 和 RXD 在硬件上进行连接,然后运行测试程序,进行写和读操作,预期结果是读出的数据要完全等于写入的数据
硬件连接: 把 TXD 和 RXD 通过跳线帽直接硬件上连接在一起:
软件运行
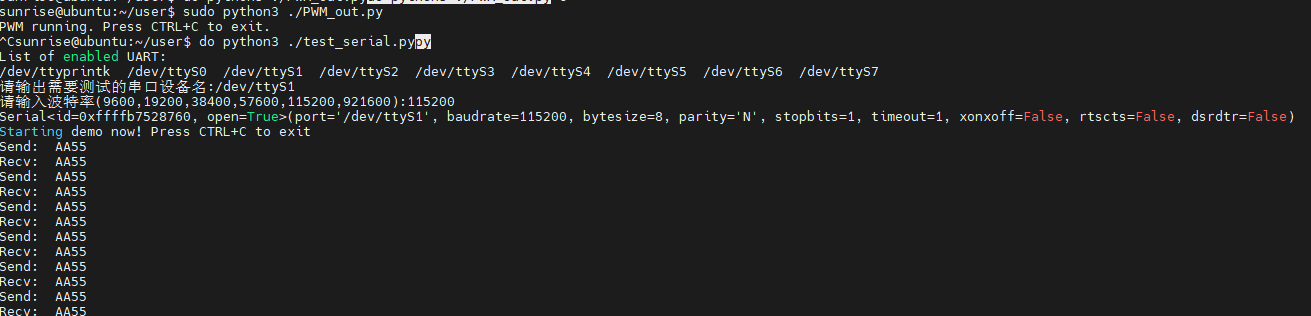
(1)从打印的串口设备(其中 /dev/ttyS0 是系统调试口,不建议对它进行测试,除非你完全明白它的作用)中选择总线号和片选号作为输入选项,RDK X5 选择测试 /dev/ttyS1,并输入波特率参数:
(2)进入用户主目录,运行
cd usersudo python3 ./test_serial.py
#!/usr/bin/env python3
import sys
import signal
import os
import time
# 导入python串口库
import serial
import serial.tools.list_ports
def signal_handler(signal, frame):
sys.exit(0)
def serialTest():
print("List of enabled UART:")
os.system('ls /dev/tty[a-zA-Z]*')
uart_dev= input("请输出需要测试的串口设备名:")
baudrate = input("请输入波特率(9600,19200,38400,57600,115200,921600):")
try:
ser = serial.Serial(uart_dev, int(baudrate), timeout=1) # 1s timeout
except Exception as e:
print("open serial failed!\n")
print(ser)
print("Starting demo now! Press CTRL+C to exit")
while True:
test_data = "AA55"
write_num = ser.write(test_data.encode('UTF-8'))
print("Send: ", test_data)
received_data = ser.read(write_num).decode('UTF-8')
print("Recv: ", received_data)
time.sleep(1)
ser.close()
return 0
if __name__ == '__main__':
signal.signal(signal.SIGINT, signal_handler)
if serialTest() != 0:
print("Serial test failed!")
else:
print("Serial test success!")