语音LLM应用
实验06-多模态视觉运用-语音对话
实验准备:
- 确保已接入火山引擎豆包AI以及讯飞AI(参考实验01、实验02)
- 接入usb摄像头(本实验以usb摄像头为例),运行ls /dev/video*,检查摄像头是否接入,程序中使用默认摄像头接口video0,如接口不符可自行更改。
- 安装 OpenCV: pip install opencv-python (如已安装可跳过)
实验步骤:(确保语音模块已连接)
- cd AI_online_voice #进入主目录
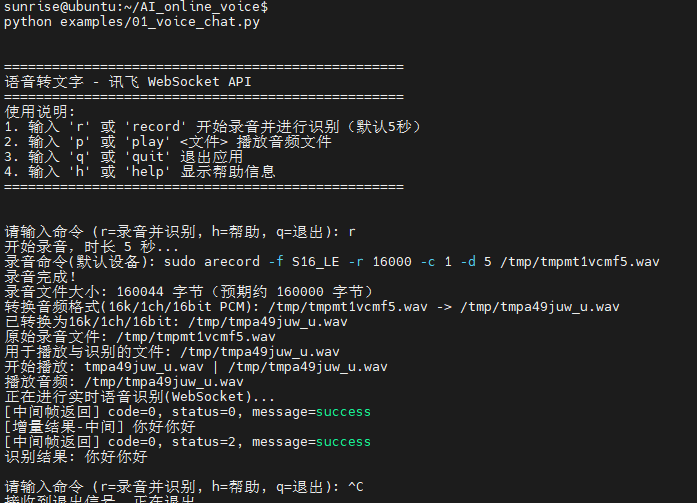
- python examples/06_voice_camera_analysis.py #运行示例程序
终端运行示例:
# -*- coding: utf-8 -*-
"""
06_voice_camera_analysis.py
实验06:以摄像头接入-语音分析为主题
流程:接入摄像头 → 实时小窗口显示 → 语音输入指令 → 截图当前画面 → 将截图与语音指令一起提交给豆包分析
参考:
- 摄像头接入:AI/examples/06_camera_input_loop.py
- 语音分析指令:AI_online_voice/examples/05_voice_document_analysis.py
指令:
- r [秒数]:录音指定秒数(默认5秒),识别文本并提交当前截图进行联合分析
- p:回放最近一次录音
- h:帮助
- q:退出
"""
import os
import sys
import time
import threading
import wave
import base64
from typing import Optional
# OpenCV 依赖
try:
import cv2
except Exception:
cv2 = None
print("[依赖缺失] 未安装 opencv-python,请先安装:pip install opencv-python")
CURRENT_DIR = os.path.dirname(os.path.abspath(__file__))
PROJECT_ROOT = os.path.dirname(CURRENT_DIR)
sys.path.append(PROJECT_ROOT)
from utils.audio_processor import AudioProcessor
import config
# 复用实验03中的客户端(已内联并修复鉴权逻辑)
import importlib.util
EXP03_PATH = os.path.join(PROJECT_ROOT, "examples", "03_voice_image_dialogue.py")
spec = importlib.util.spec_from_file_location("exp03", EXP03_PATH)
exp03 = importlib.util.module_from_spec(spec)
spec.loader.exec_module(exp03)
DoubaoImageClient = exp03.DoubaoImageClient
XunfeiRealtimeSpeechClient = exp03.XunfeiRealtimeSpeechClient
ROOT_CONFIG = getattr(exp03, "ROOT_CONFIG", None)
class CameraStreamer:
"""摄像头实时显示与帧维护。"""
def __init__(self, cam_index='video0', window_name: str = "Camera Feed", width: int = 1280, height: int = 720):
self.cam_index = cam_index # 可为索引(int)或设备名/路径(str)
self.window_name = window_name
self.width = width
self.height = height
self.cap = None
self.thread = None
self.running = False
self.current_frame = None
def _open_capture(self, source):
"""在不同平台尝试打开摄像头,支持 'video0' 语义。"""
# 将 'video0' 规范化为平台兼容的来源
if isinstance(source, str):
s = source.lower().strip()
if s == 'video0':
if os.name == 'nt':
# Windows 不存在 /dev/video0,映射为索引 0
source = 0
else:
# 非 Windows 按设备路径打开
source = "/dev/video0"
elif s.startswith("/dev/video"):
# Linux/WSL 等直接使用设备路径
source = s
else:
# 尝试将字符串转换为索引
try:
source = int(s)
except Exception:
# 无法解析则回退到索引 0
source = 0
# 按平台选择后端
if os.name == 'nt':
# 依次尝试 DSHOW -> MSMF -> 默认
cap = cv2.VideoCapture(source, cv2.CAP_DSHOW)
if not cap or not cap.isOpened():
cap = cv2.VideoCapture(source, cv2.CAP_MSMF)
if not cap or not cap.isOpened():
cap = cv2.VideoCapture(source)
else:
# 非 Windows 默认后端通常为 V4L2
cap = cv2.VideoCapture(source)
return cap
def start(self) -> bool:
if cv2 is None:
print("[错误] OpenCV 未安装,无法启动摄像头窗口")
return False
try:
# 打开摄像头(支持 'video0' 映射)
self.cap = self._open_capture(self.cam_index)
if not self.cap or not self.cap.isOpened():
print(f"[错误] 无法打开摄像头源:{self.cam_index},请检查设备或权限")
print("[提示] 可尝试:--camera 0 / --camera video0 / --camera /dev/video0")
return False
# 对齐示例参数:设置采集分辨率为 1280x720(若设备支持)
try:
self.cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1280)
self.cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 720)
except Exception:
pass
# 打印实际分辨率,便于诊断
try:
actual_w = int(self.cap.get(cv2.CAP_PROP_FRAME_WIDTH))
actual_h = int(self.cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
print(f"[摄像头] 已打开源={self.cam_index},实际分辨率={actual_w}x{actual_h}")
except Exception:
pass
cv2.namedWindow(self.window_name, cv2.WINDOW_NORMAL)
cv2.resizeWindow(self.window_name, 1280, 720)
self.running = True
# 不再在子线程中显示画面,改由主线程循环显示,避免部分平台窗口不出现的问题
return True
except Exception as e:
print(f"[摄像头启动失败] {e}")
return False
def update_display(self) -> int:
"""读取一帧并显示在窗口,由主线程循环调用。返回按键码(无按键为 -1)。"""
if not self.cap:
return -1
ret, frame = self.cap.read()
if not ret:
time.sleep(0.05)
return -1
self.current_frame = frame.copy()
cv2.imshow(self.window_name, frame)
key = cv2.waitKey(1) & 0xFF
return key
def snapshot_to_file(self, path: str) -> Optional[str]:
if cv2 is None:
return None
frame = self.current_frame
if frame is None:
print("[提示] 当前没有可用帧,请稍后重试")
return None
try:
# 将 BGR 帧编码为 JPEG 并保存
ok, buf = cv2.imencode(".jpg", frame)
if not ok:
print("[错误] 帧编码失败")
return None
with open(path, "wb") as f:
f.write(buf.tobytes())
return path
except Exception as e:
print(f"[快照保存失败] {e}")
return None
def stop(self):
self.running = False
try:
time.sleep(0.1)
except Exception:
pass
try:
if self.cap:
self.cap.release()
except Exception:
pass
try:
cv2.destroyWindow(self.window_name)
except Exception:
pass
class VoiceCameraAnalysisApp:
def __init__(self, cam_source: Optional[str] = None):
self.processor = AudioProcessor()
self.asr = XunfeiRealtimeSpeechClient()
self.doubao = DoubaoImageClient()
# 允许通过参数或环境变量选择摄像头源,默认使用 'video0'
source = cam_source if cam_source is not None else os.getenv("CAMERA_SOURCE", "video0")
self.camera = CameraStreamer(cam_index=source)
self.last_audio: Optional[str] = None
self.last_wav: Optional[str] = None
self.snapshot_path = os.path.join(PROJECT_ROOT, "assets", "camera_snapshot.jpg")
self._ensure_assets_dir()
def _ensure_assets_dir(self):
assets_dir = os.path.join(PROJECT_ROOT, "assets")
os.makedirs(assets_dir, exist_ok=True)
def print_help(self):
print("\n指令帮助:")
print(" r [秒数] 录音指定秒数(默认5秒),并提交当前摄像头截图 + 语音文本进行分析")
print(" p 回放最近一次录音")
print(" h 查看帮助")
print(" q 退出\n")
def _take_snapshot(self) -> Optional[str]:
path = self.snapshot_path
snap = self.camera.snapshot_to_file(path)
if not snap:
print("[错误] 无法获取截图。请确认摄像头已启动且有画面。")
return None
return snap
def handle_record(self, duration_sec: int):
print(f"[操作] 开始录音 {duration_sec} 秒…")
audio_file = self.processor.record(duration_sec)
if not audio_file:
print("[错误] 录音失败")
return
self.last_audio = audio_file
try:
with wave.open(audio_file, "rb") as wf:
print(f"[音频信息] rate={wf.getframerate()}, ch={wf.getnchannels()}, bits={wf.getsampwidth()*8}")
except Exception:
pass
wav_path = self.processor.convert_to_wav(audio_file)
if not wav_path:
print("[错误] 转换 WAV 失败")
return
self.last_wav = wav_path
print("[识别] 讯飞实时识别…")
text = self.asr.transcribe_audio_ws(wav_path)
if not text:
print("[识别失败] 未获取到文本")
return
print(f"[识别结果] {text}")
print("[摄像头] 获取当前画面截图…")
snap_path = self._take_snapshot()
if not snap_path:
return
print(f"[截图] {snap_path}")
print("[豆包] 提交截图 + 指令进行分析…")
try:
sys_prompt = getattr(ROOT_CONFIG, "SYSTEM_PROMPT", None) if ROOT_CONFIG else None
# 复用豆包图像接口:文本 + 图片
reply = self.doubao.chat_with_image_file(text, snap_path, system_prompt=sys_prompt)
if reply:
print("[豆包回复]", reply)
else:
print("[豆包回复] None")
except Exception as e:
print("[豆包错误]", e)
def handle_play(self):
if not self.last_audio:
print("[提示] 尚无可回放的录音。请先使用 r 指令录音。")
return
print("[播放] 回放最近一次录音…")
self.processor.play(self.last_audio)
def run(self):
print("\n=== 06 摄像头接入 + 语音分析(讯飞 + 豆包)实验 ===")
self.print_help()
ok = self.camera.start()
if not ok:
print("[错误] 摄像头未能启动,无法显示实时画面与截图分析。")
return
print("[提示] 摄像头窗口已启动(窗口内按 Q 退出,或在终端输入 q)。")
stop_flag = False
def input_loop():
nonlocal stop_flag
while not stop_flag:
try:
cmd = input("请输入指令 (r/p/h/q): ").strip()
except (EOFError, KeyboardInterrupt):
print("\n[退出]")
stop_flag = True
break
if not cmd:
continue
if cmd == "q":
print("[退出]")
stop_flag = True
break
if cmd == "h":
self.print_help()
continue
if cmd == "p":
self.handle_play()
continue
if cmd.startswith("r"):
parts = cmd.split()
duration = 5
if len(parts) >= 2:
try:
duration = int(parts[1])
except Exception:
print("[提示] 秒数无效,使用默认 5 秒")
self.handle_record(duration)
t = threading.Thread(target=input_loop, daemon=True)
t.start()
# 主线程循环显示摄像头画面
while not stop_flag:
try:
key = self.camera.update_display()
if key in (ord('q'), ord('Q')):
stop_flag = True
break
except Exception:
time.sleep(0.05)
continue
self.camera.stop()
if __name__ == "__main__":
import argparse
parser = argparse.ArgumentParser(description="摄像头接入 + 语音分析")
parser.add_argument("--camera", type=str, default=os.getenv("CAMERA_SOURCE", "video0"),
help="摄像头源: 索引(如 0)或设备名(如 video0)/路径(/dev/video0)")
args = parser.parse_args()
VoiceCameraAnalysisApp(cam_source=args.camera).run()