USB模块使用
USB 语音模块使用教程
命令集:
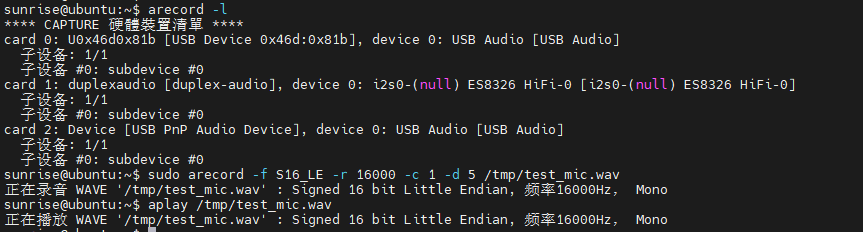
- arecord -l 识别麦克风的卡号与设备号(关注 card X 和 device Y )
- arecord -L 列出可用的 PCM 设备名(如 plughw:1,0 )
- aplay -l 检查扬声器/输出设备
- sudo arecord -f S16_LE -r 16000 -c 1 -d 5 /tmp/test_mic.wav //使用默认设备录 5 秒,16k/单声道/16bit:
- aplay /tmp/test_mic.wav //播放音频
终端运行示例:(确保语音模块以及喇叭正确连接)