机器视觉技术开发
实验4-Yolov5物体检测
实验步骤:
- 需安装python3、opencv、conda环境。(如已安装可略过、可参考实验1-3的环境安装流程)
- 克隆YOLOv5模型,终端输入指令:git clone https://github.com/ultralytics/yolov5

3.cp -r /home/sunrise/yolov5 /home/sunrise/OPENCV/ #将yolov5文件包拷贝到功能包中保存
cd OPENCV
pip install -r /home/sunrise/OPENCV/requirements_yolov5_torch.txt(安装 YOLOv5 运行的最小依赖)
4.source rdkx5_vision_env/bin/activate #激活虚拟环境
5.安装关联包:
在OPENCV目录下
先升级 pip:python -m pip install --upgrade pip
运行以下命令:
pip install torch torchvision --extra-index-url https://download.pytorch.org/whl/cpu)
pip install ultralyticspip install pandas psutil thop scipypython -m
pip install tqdm后续可能用到,建议一起安装:python -m pip install pandas psutil thop pillow pyyaml requests matplotlib seaborn
(以下步骤可先忽略,先尝试运行示例文件,如若版本依赖过低导致无法运行模型再进行更新:
升级基础安装工具:python -m pip install -U pip wheel setuptools==70.0.0
安装/升级缺失依赖:python -m pip install -U gitpython pillow==10.3.0
)
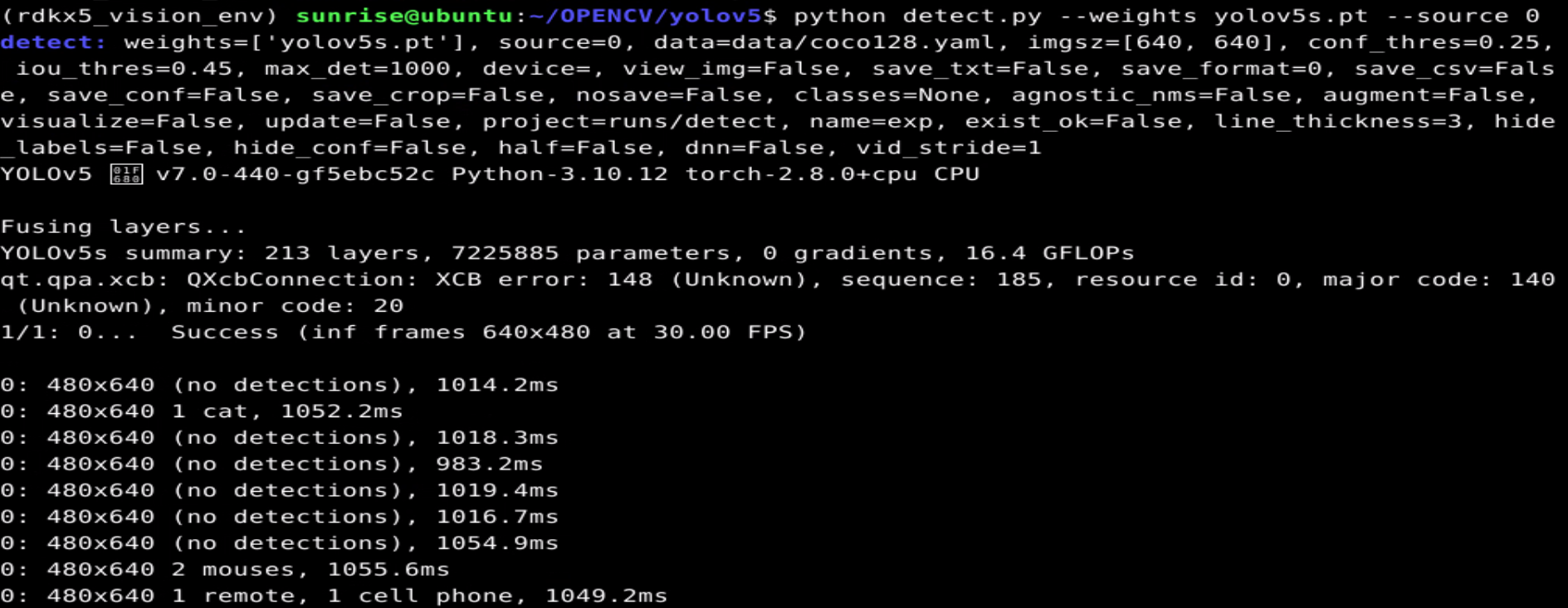
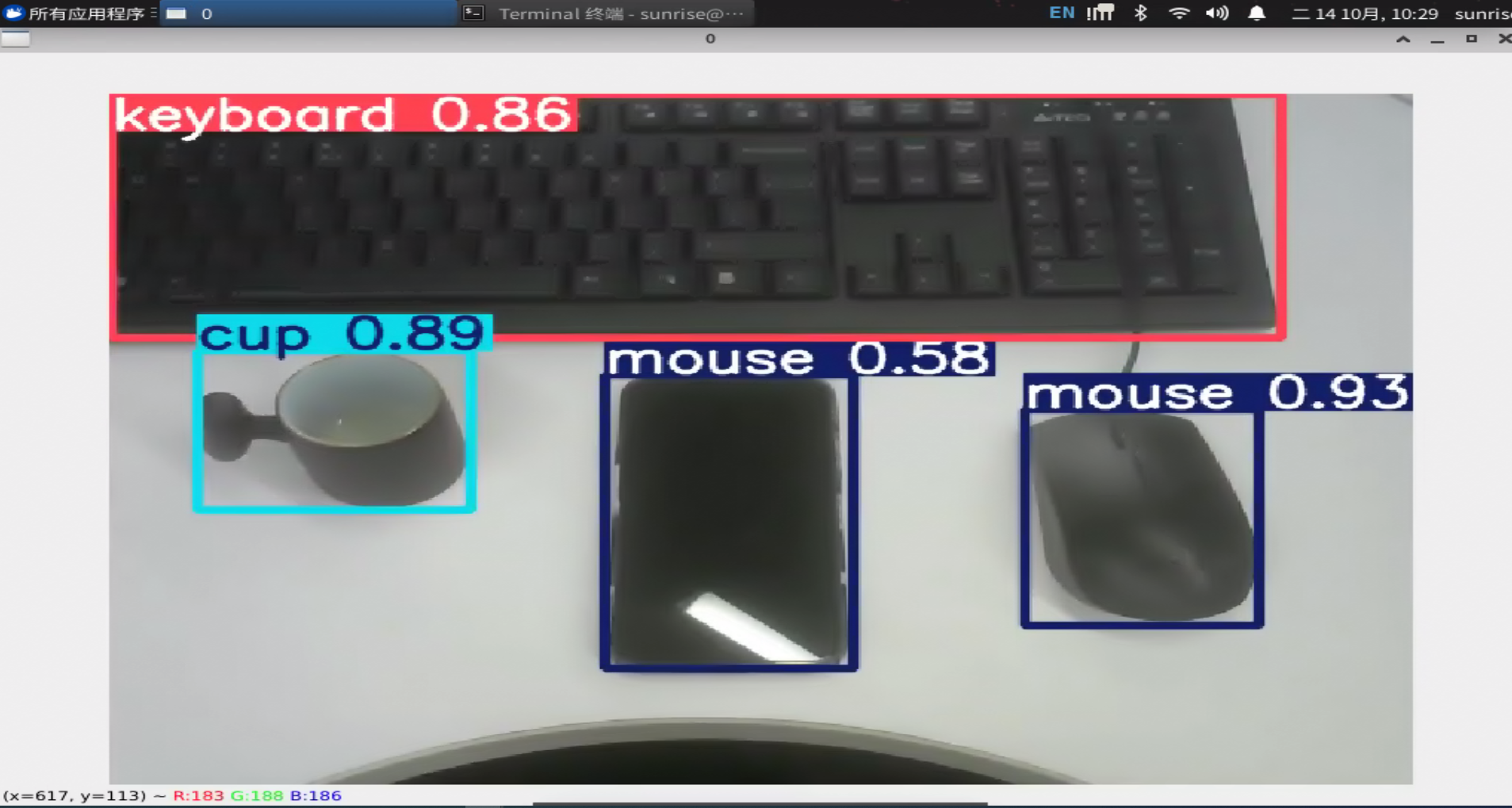
cd yolov5#进入文件包python detect.py --weights yolov5s.pt --source 0#运行摄像头版示例文件,需确保摄像头正常连接
终端打印如下:
如若无摄像头,可选择本地图片或视频导入:
- 使用本地图片快速验证
- python detect.py --weights yolov5s.pt --source path\to\image.jpg #source后修改为图片路径
- 使用视频文件验证
- python detect.py --weights yolov5s.pt --source path\to\video.mp4 #source后修改为视频路径