ROS2基础开发
实验01-搭建环境
一、一键配置
打开终端,运行安装命令,执行鱼香ROS配置脚本:
wget http://fishros.com/install -O fishros && . fishros
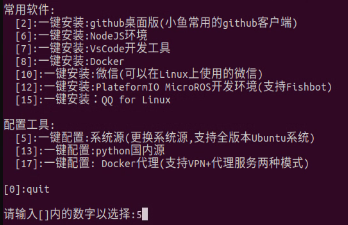
之后出现以下选项,输入数字5,按下回车键,实现系统源的更换。
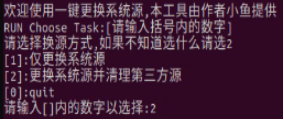
之后,输入数字2,按下回车键,一键配置系统源
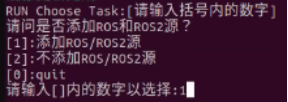
配置完系统源后,出现下方界面,输入数字1,按下回车键,添加ROS/ROS2源
此时,系统源的相关设置完成,下一步就是安装ROS2。
二、一键安装
打开ubuntu终端,输入命令:
wget http://fishros.com/install -O fishros && . fishros
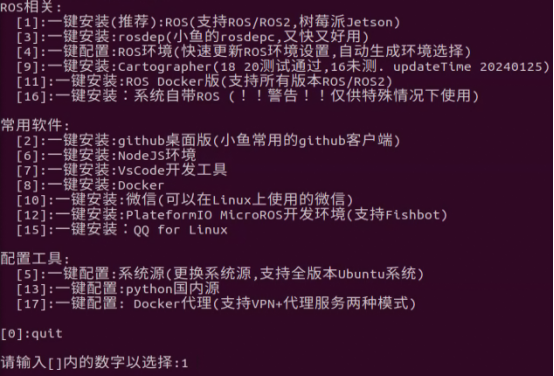
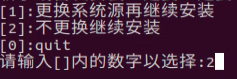
然后我们输入 1 一键安装 –> 不更换源安装 –> 选择你ubuntu版本对应的ros版本 –> 进行安装
输入数字2(不更换源安装)
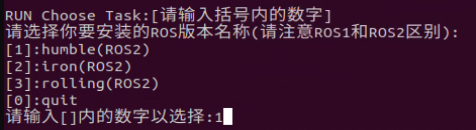
输入数字1,选择humble(ROS2)
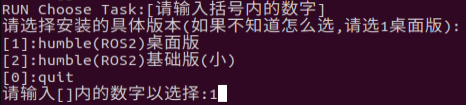
输入数字1,选择humble(ROS2)桌面版
安装完成后新建一个终端,打开输入:
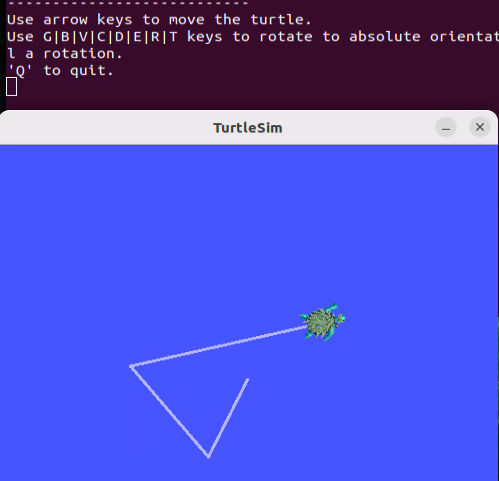
ros2 run turtlesim turtlesim_node
这会启动海龟仿真窗口,中间会出现一只默认的小海龟。

另开一个终端,运行以下命令:
ros2 run turtlesim turtle_teleop_key
启动后,终端会提示:Use arrow keys to move the turtle。此时可以通过键盘的 方向键 控制小海龟移动。
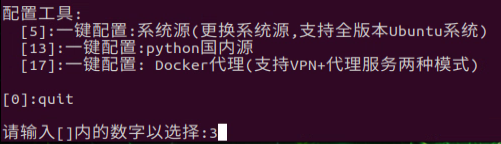
三、配置 rosdep
打开ubuntu终端,输入命令:
wget http://fishros.com/install -O fishros && . fishros
再输入 3 就一键配置了( 注意,如果出现了“输入以下XXX指令完成更新"就按照终端中出现的指令进行更新即可。)
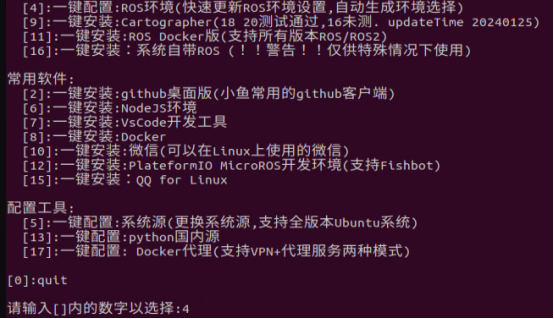
四、更新系统环境
打开ubuntu终端,输入命令:
wget http://fishros.com/install -O fishros && . fishros
再输入 4 就一键配置了
到这里,我们的ROS安装完成了。