OpenHarmony概述
1.项目介绍
OpenHarmony是由开放原子开源基金会(OpenAtom Foundation)孵化及运营的开源项目,目标是面向全场景、全连接、全智能时代,基于开源的方式,搭建一个智能终端设备操作系统的框架和平台,促进万物互联产业的繁荣发展。
1.1 技术架构
OpenHarmony整体遵从分层设计,从下向上依次为:内核层、系统服务层、框架层和应用层。系统功能按照“系统 > 子系统 > 组件”逐级展开,在多设备部署场景下,支持根据实际需求裁剪某些非必要的组件。OpenHarmony技术架构如下所示
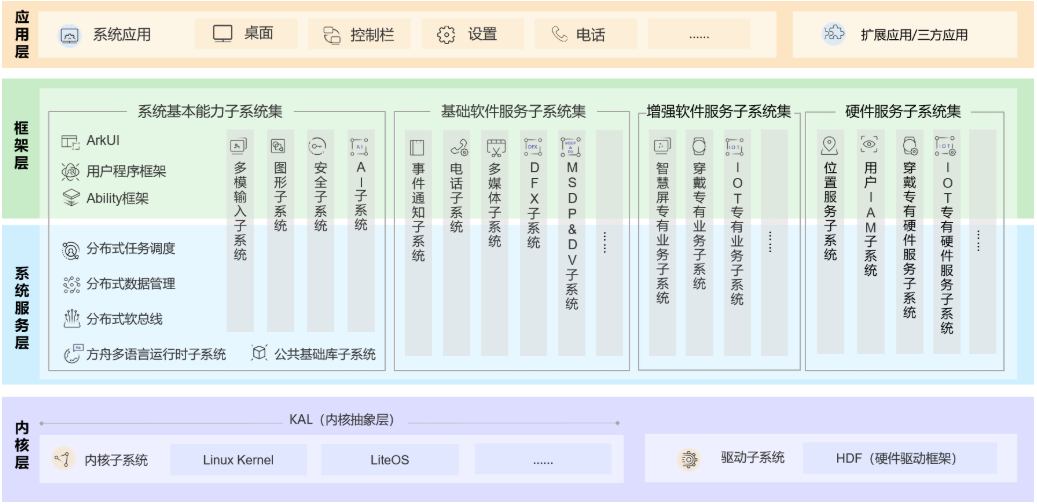
1.1.1 内核层
· 内核子系统:采用多内核(Linux内核或者LiteOS)设计,支持针对不同资源受限设备选用适合的OS内核。内核抽象层(KAL,Kernel Abstract Layer)通过屏蔽多内核差异,对上层提供基础的内核能力,包括进程/线程管理、内存管理、文件系统、网络管理和外设管理等。
· 驱动子系统:驱动框架(HDF)是系统硬件生态开放的基础,提供统一外设访问能力和驱动开发、管理框架。
1.1.2 系统服务层
系统服务层是OpenHarmony的核心能力集合,通过框架层对应用程序提供服务。该层包含以下几个部分:
· 系统基本能力子系统集:为分布式应用在多设备上的运行、调度、迁移等操作提供了基础能力,由分布式软总线、分布式数据管理、分布式任务调度、公共基础库、多模输入、图形、安全、AI等子系统组成。
· 基础软件服务子系统集:提供公共的、通用的软件服务,由事件通知、电话、多媒体、DFX(Design For X)
· 增强软件服务子系统集:提供针对不同设备的、差异化的能力增强型软件服务,由智慧屏专有业务、穿戴专有业务、IoT专有业务等子系统组成。
· 硬件服务子系统集:提供硬件服务,由位置服务、用户IAM、穿戴专有硬件服务、IoT专有硬件服务等子系统组成。
注意:
根据不同设备形态的部署环境,基础软件服务子系统集、增强软件服务子系统集、硬件服务子系统集内部可以 按子系统粒度裁剪,每个子系统内部又可以按功能粒度裁剪。
1.1.3 框架层
框架层为应用开发提供了C/C++/JS等多语言的用户程序框架和Ability框架,适用于JS语言的ArkUI框架,以及各种软硬件服务对外开放的多语言框架API。根据系统的组件化裁剪程度,设备支持的API也会有所不同。
1.1.4 应用层
应用层包括系统应用和第三方非系统应用。应用由一个或多个FA(Feature Ability)或PA(Particle Ability)组成。其中,FA有UI界面,提供与用户交互的能力;而PA无UI界面,提供后台运行任务的能力以及统一的数据访问抽象。基于FA/PA开发的应用,能够实现特定的业务功能,支持跨设备调度与分发,为用户提供一致、高效的应用体验。
1.2 技术特性
1.2.1 硬件互助,资源共享
分布式软总线:
· 分布式软总线是多设备终端的统一基座,为设备间的无缝互联提供了统一的分布式通信能力,能够快速发现并连接设备,高效地传输任务和数据。
分布式数据管理:
· 分布式数据管理基于分布式软总线,实现了应用程序数据和用户数据的分布式管理。用户数据不再与单一物理设备绑定,业务逻辑与数据存储分离,应用跨设备运行时数据无缝衔接,为打造一致、流畅的用户体验创造了基础条件
分布式任务调度:
· 分布式任务调度基于分布式软总线、分布式数据管理、分布式Profile等技术特性,构建统一的分布式服务管理(发现、同步、注册、调用)机制,支持对跨设备的应用进行远程启动、远程调用、绑定/解绑、以及迁移等操作,能够根据不同设备的能力、位置、业务运行状态、资源使用情况并结合用户的习惯和意图,选择最合适的设备运行分布式任务
设备虚拟化:
· 分布式设备虚拟化平台可以实现不同设备的资源融合、设备管理、数据处理,将周边设备作为手机能力的延伸,共同形成一个超级虚拟终端。
1.2.2 一次开发,多端部署
OpenHarmony提供用户程序框架、Ability框架以及UI框架,能够保证开发的应用在多终端运行时保证一致性。一次开发、多端部署。
多终端软件平台API具备一致性,确保用户程序的运行兼容性。
· 支持在开发过程中预览终端的能力适配情况(CPU/内存/外设/软件资源等)。
· 支持根据用户程序与软件平台的兼容性来调度用户呈现。
1.2.3 统一OS,弹性部署
OpenHarmony通过组件化和组件弹性化等设计方法,做到硬件资源的可大可小,在多种终端设备间,按需弹性部署,全面覆盖了ARM、RISC-V、x86等各种CPU,从百KiB到GiB级别的RAM。