01 开发环境搭建
本章节详细介绍如何为GK7206(XM7206V1系列)芯片搭建完整的交叉编译开发环境。
开发环境概述
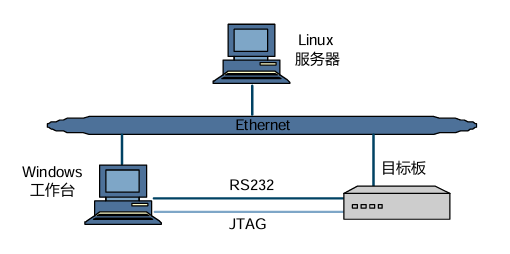
由于目标机(GK7206)资源有限,无法运行开发和调试工具,因此在性能强大的宿主机上进行程序的编译、链接和定位,生成可执行文件后,再烧写到目标机中运行,即采用"宿主机+目标机(评估板)"的交叉编译模式。
典型的开发环境由三个部分组成,并处于同一网络中:
- Linux服务器:作为交叉编译环境,完成SDK的编译与构建。
- Windows工作台:通过mobaxterm等SSH客户端工具远程登录Linux服务器进行开发,并通过串口/网口/USB与目标板连接,用于运行调试工具、烧写软件。
- 目标板(ShiMeta-Pico-G1):运行最终编译生成的系统镜像和应用程序。
说明
开发环境中使用了Windows工作台,但实际上很多工作(如使用minicom代替超级终端)也可以在Linux服务器上完成,用户可自行选择。
搭建Linux服务器编译环境
以下步骤以推荐的64位Ubuntu 18.04系统为例进行说明。
1. 硬件与系统推荐配置
推荐使用64位Linux服务器,以确保开发包的兼容性。推荐配置如下:
- CPU:Intel(R) Xeon(R) CPU E5-2450 0 @ 2.10GHz 或更好
- 内存 (DDR):>= 16GB
- 硬盘:>= 600GB
- 网络:千兆以太网
- 操作系统:Ubuntu 18.04 64bit
本开发包默认使用以下Linux系统版本进行编译: Linux version 4.15.0-192-generic (gcc version 7.5.0 (Ubuntu 7.5.0-3ubuntu1~18.04)) #203-Ubuntu SMP Wed Aug 10 17:40:03 UTC 2022
2. SDK获取
相关信息
请用户自行根据服务器Linux发行版安装git工具
1. 拉取SDK
git clone [git仓库的https地址]2. 验证SDK
进入SDK根目录,进行一次编译和烧录,验证是否能够将固件烧录进ShiMeta-Pico-G1并成功运行 具体请参考镜像编译,镜像烧录,系统登录