04 系统登录
本章节以MobaXterm软件为例,介绍如何通过串口、SSH登录ShiMetaPi-Pico-G1开发板,进入 Linux 命令行终端进行开发调试。
1. MobaXterm 软件安装
安装MobaXterm软件,在软件官网选择免费版安装即可, MobaXterm官网,如下图: 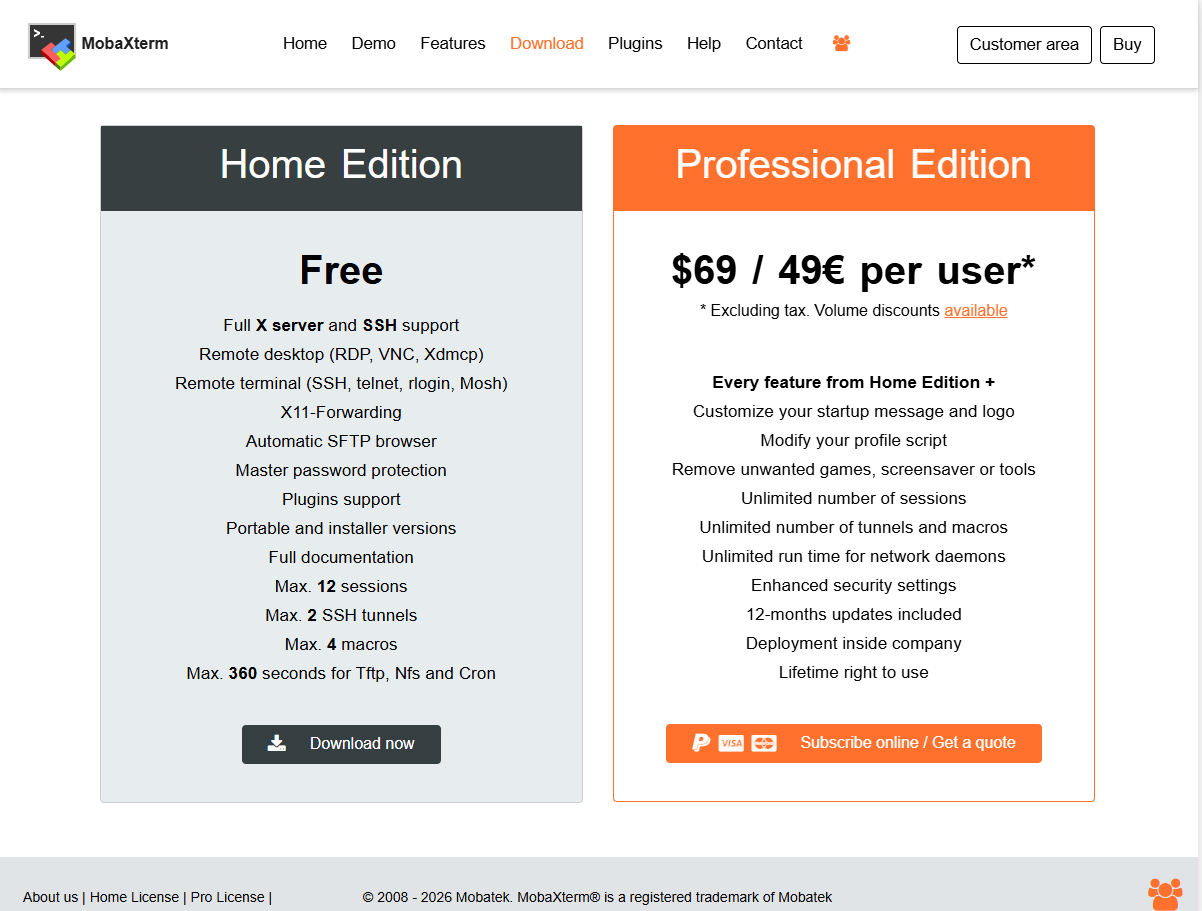
2. 使用串口登录
2.1 功能说明
串口登录是最基础、最可靠的登录方式,不依赖网络配置,适合首次使用和系统调试场景。Pico-G1 开发板通过串口小板(FT232)连接到 PC 的 USB 口,使用串口终端软件进行通信。
2.2 硬件连接
所需器材:
| 器材 | 说明 |
|---|---|
| ShiMetaPi-Pico-G1 开发板 | 目标板 |
| FT232 串口小板 | SDK 配套提供 |
| USB 数据线 | 连接串口小板与 PC |
| 杜邦线 3 根 | 连接串口小板与开发板 |
接线方式:
| 串口小板 | ShiMetaPi-Pico-G1 开发板 |
|---|---|
| TX | RX |
| RX | TX |
| GND | GND |
注意
TX 接 RX,RX 接 TX,不要同名引脚对接。GND 必须连接,否则通信不稳定。请勿连接 VCC 引脚,避免电压不匹配损坏开发板。
2.3 操作步骤
步骤1:安装串口驱动。
在 Windows 工作台上安装 FT232 驱动,驱动程序位于 SDK 发布包中:
sdk/tools/windows/burning-tools/ftdi-driver/FTDI-CDM-Driver.exe双击运行安装程序,按向导完成安装。
步骤2:确认串口号。
将串口小板通过 USB 线连接到 PC,打开 Windows 设备管理器,在"端口 (COM 和 LPT)"下查看串口号:
设备管理器
└── 端口 (COM 和 LPT)
└── USB Serial Port (COM3) ← 记录此端口号预期输出:
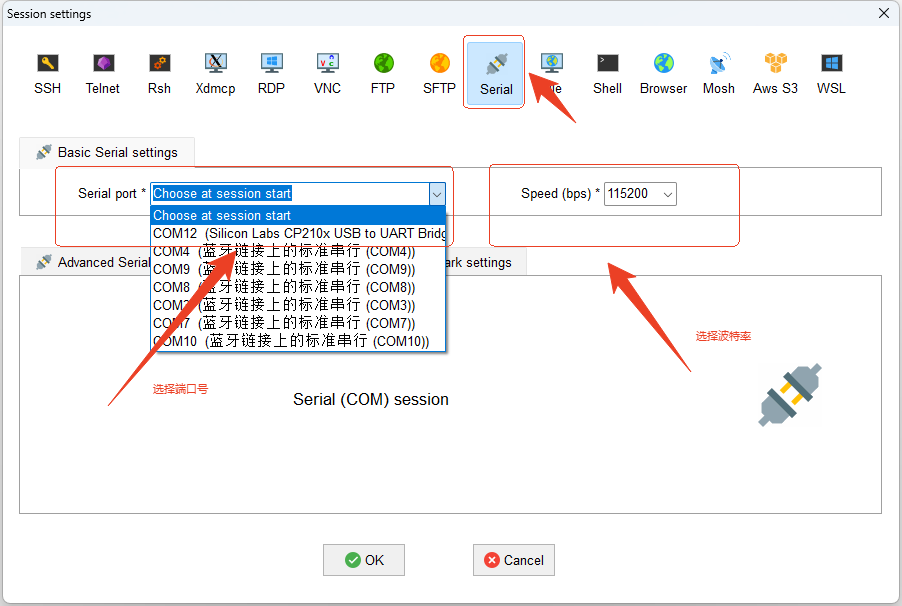
端口号示例:COM3、COM5 等,因 PC 而异步骤3:使用MobaXterm登录
说明
波特率需选择为115200
 步骤4:复位
步骤4:复位
连接开发板复位,串口终端将打印启动信息:
U-Boot 2021.04 (Apr 26 2026 - 10:00:00 +0800)
Model: GK7206V11A Demo Board
DRAM: 128 MiB
...
Loading Environment from SPI Flash... OK
Hit any key to stop autoboot: 0
...
Starting kernel ...
[ 0.000000] Booting Linux on physical CPU 0x0
[ 0.000000] Linux version 5.10.130 (user@server) (arm-gcc12.2.0-linux-uclibceabi-gcc 12.2.0) #1 SMP PREEMPT
...
[ 2.500000] Freeing unused kernel memory: 1024K
[ 2.600000] Run /sbin/init as init process
Welcome to GK7206
GK7206V11A login:提示
在启动过程中按回车键进入 U-Boot 命令行,输入 boot 命令可继续启动 Linux 系统。
3. 使用SSH登录
说明
SSH 登录是一种基于网络的远程登录方式,Pico-G1 开发板通过网线接入局域网,PC 端使用 SSH 客户端软件(如 MobaXterm)连接开发板,实现远程命令行操作。 因此使用SSH的前提条件就是Pico-G1开发板的前提条件就是Pico-G1和PC端处于同一个局域网中
步骤1:下载并安装局域网 IP 扫描工具Zenmap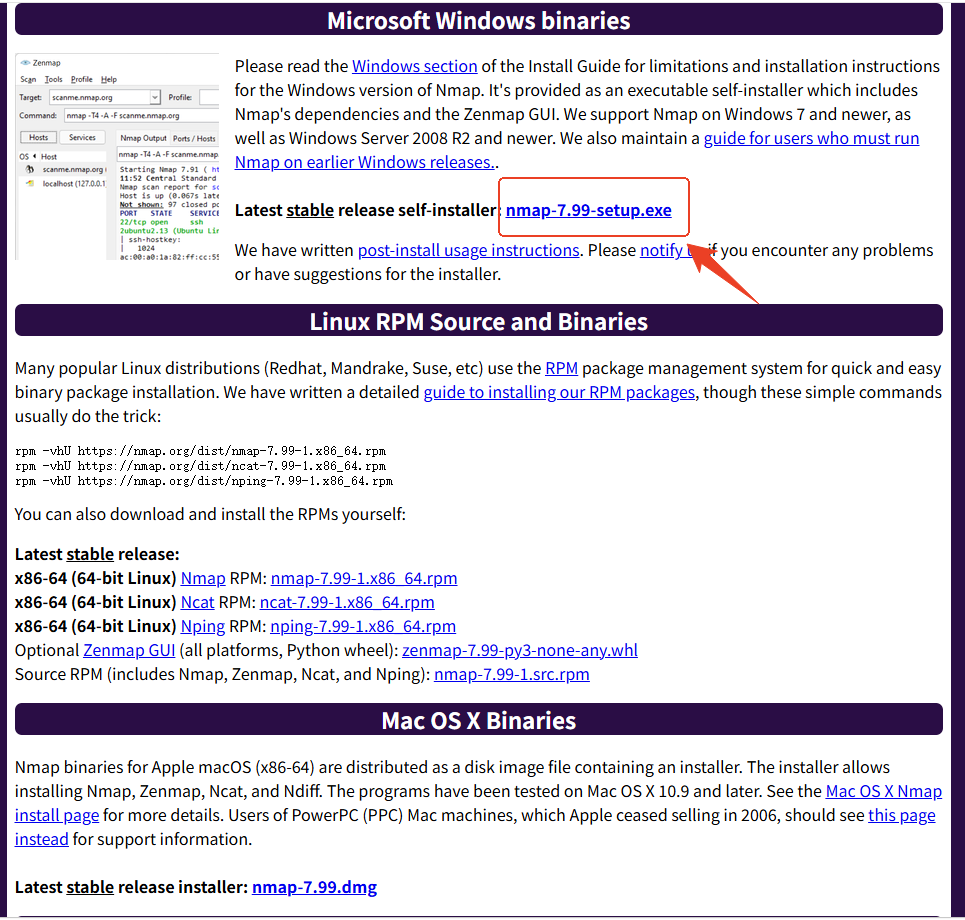 安装步骤按提示一直点
安装步骤按提示一直点next即可。
步骤2:查看Pico-G1开发板的IP地址
- 打开Zenmap
- 运行 Zenmap,在
Target下拉菜单中选择自己的所属网段,Profile选择Ping scan,点击Scan按钮,扫描当前局域网内的 IP 地址。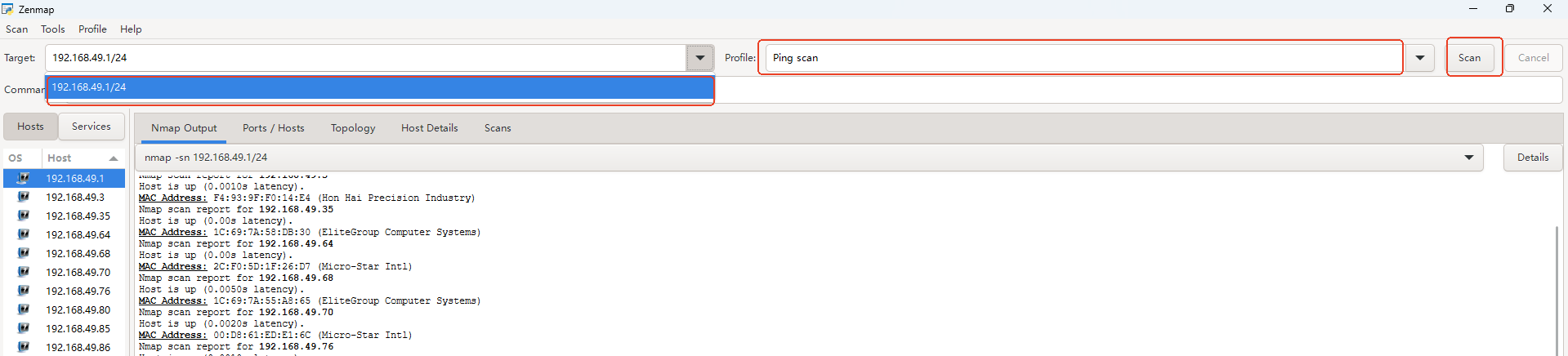
- 记录当前的所有扫描出来的 IP 地址。
- 将设备上电,并确保设备连接上网络后(建议上电后等待10秒)
- 重新点击 Scan 按钮,扫描当前局域网内的 IP 地址:
- 排除掉所有先前记录的的 IP 地址,剩下的就是Pico-G1的 IP 地址了
步骤3:使用MobaXterm登录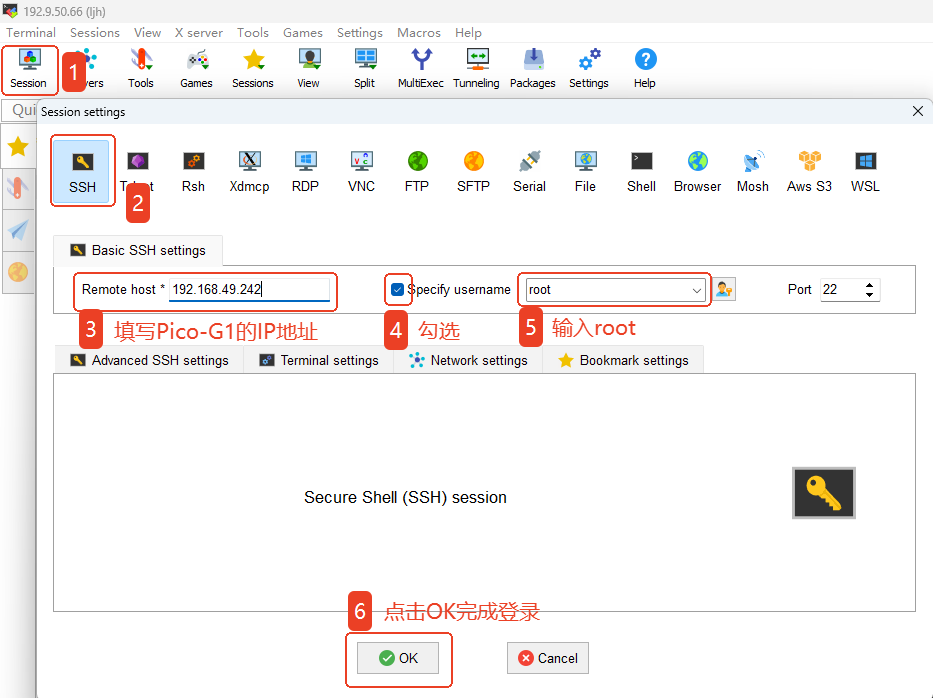 输入默认用户密码:
输入默认用户密码:123456后按回车键 
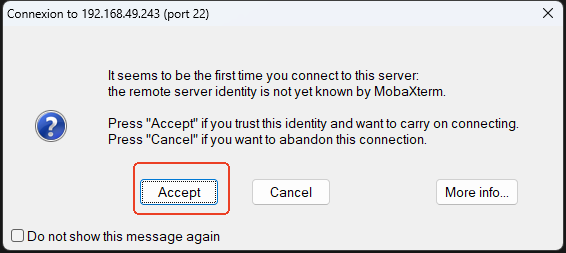
选择Accept
选择No
步骤4:成功登录