第五章 系统调试--HDC调试
1. 前言
hdc(OpenHarmony Device Connector)是为开发人员提供的用于设备连接调试的命令行工具,该工具需支持部署在Windows/Linux/Mac等系统上与OpenHarmony设备(或模拟器)进行连接调试通信。
简言之,hdc是OpenHarmony提供的用于开发人员调试硬件、应用的命令行工具,用在电脑与开发板之间的交互。适用于OpenHarmony应用、硬件开发及测试人员,是每个开发人员的必备、入门工具。
2. 环境准备
支持运行环境
本文以window11电脑和Rk开发板为例进行说明
2.1 安装USB驱动
DriverAssitant 是RK 开发板自带的 USB驱动。双击 DriverInstall.exe,选择驱动安装。
1)百度网盘资料中下载瑞芯微的USB驱动压缩包(DriverAssitant_v5.1.1)
https://pan.baidu.com/s/1ZUn2BNg-Sb6M-fWhDqAFMw?pwd=smcc 提取码:smcc
2)解压压缩包后文件夹中点击驱动安装(DriverInstall.exe)
提示
驱动压缩包路径:ShiMetaPi配套网盘资料>02-软件工具> Rockchip>RKTools>windows>DriverAssitant_v5.1.1.zip
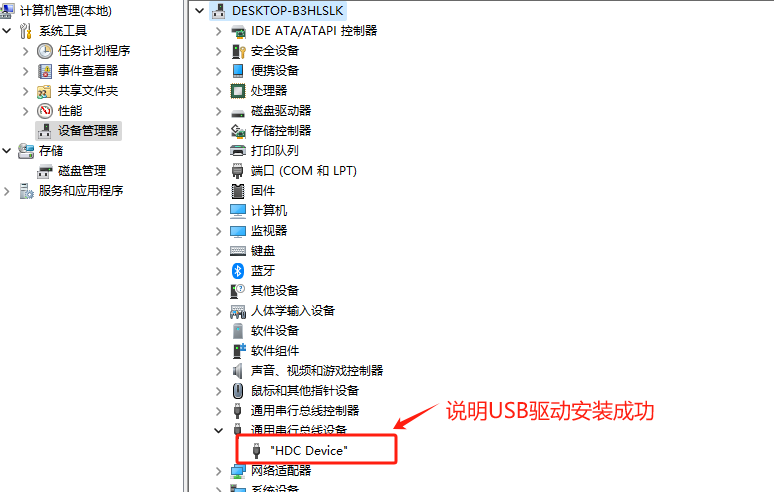
3)设备管理器查看驱动是否安装成功:
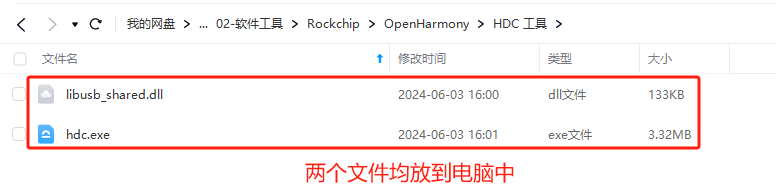
2.2 hdc工具下载
1)百度网盘资料中下载HDC工具 链接:https://pan.baidu.com/s/1nD6d__hYqQhQKyXvVfKoJg 提取码:smcc
提示
工具路径:ShiMetaPi配套网盘资料>02-软件工具>OpenHarmony>HDC 工具
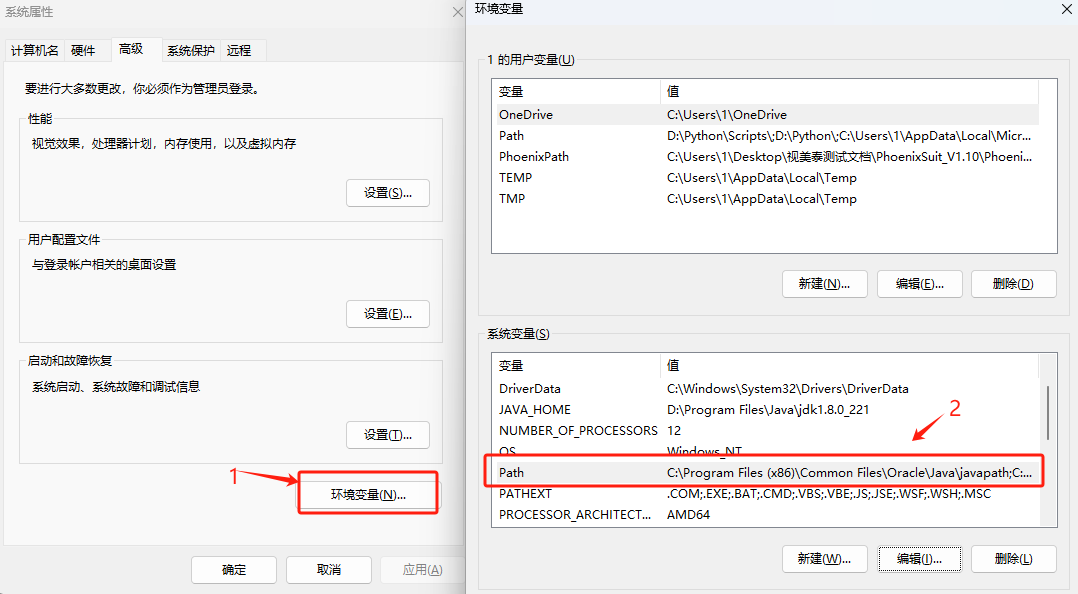
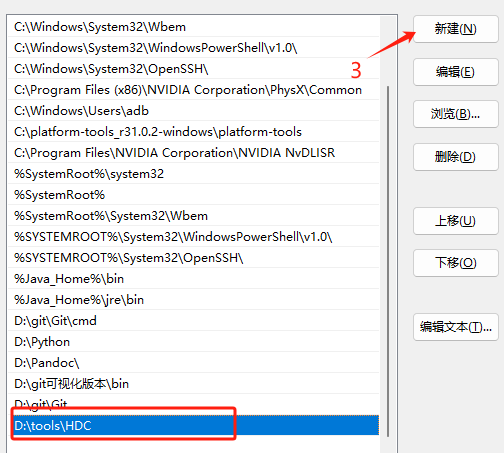
2)hdc路径环境配置:
hdc path环境配置如图所示:我的电脑,右键选择属性,选择“高级系统设置”→环境设置→系统环境变量中的 path双击→新建输入“D:\tools\HDC”→一路“确定”

注意:
环境变量中的路径选择自己电脑中hdc存在的路径,不要带中文字符
3. 连接设备
1)M4-R1的USB-OTG默认已经是device模式。
2)电脑用USB线连接设备OTG口。
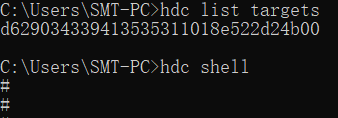
3)电脑上打开命令行工具,输入hdc list targets,连接成功可打印出设备,如下:
hdc list targets
150100414a54443452069035fa3088004)输入'hdc shell'可以进入终端
4. 常用命令
以下着重介绍些常用的HDC 指令,其他的可以自行通过搜索引擎查找
1)设备查询
hdc list targets2)remount
hdc shell mount -o remount,rw /3)启动APP
hdc shell aa start -a MainAbility -b com.example.sampledemo4)重启
hdc shell reboot5)安装APP
hdc install -r 路径.hap6)复制电脑文件到设备
hdc file send "D:\D-backup\temp_work\xxx.hap" data/xxx.hap7)复制设备文件到电脑(抓log)
hdc file recv /data/log ./openharmony_log8)查询应用信息
bm dump -n com.example.mydemo |grep system5. bn工具
Bundle Manager(包管理工具,简称bm)是实现应用安装、卸载、更新、查询等功能的工具,bm为开发者提供基本的应用安装包的调试能力,例如:安装应用,卸载应用,查询安装包信息等。
6. aa工具
Ability assistant(Ability助手,简称为aa),是实现应用及测试用例启动功能的工具,为开发者提供基本的应用调试和测试能力,例如启动应用组件、强制停止进程、打印应用组件相关信息等。