Experiment 04 - ROS2 Camera Application
Material preparation: One RDK-X5 mainboard, one USB interface camera
1. Experiment Steps
(1) Camera Connection Check
Connect the USB camera to the development board and run ls /dev/video* to check the camera connection


As shown in the figure, the camera is connected successfully. (Here we use video0 as an example)
(2) Wake Up Camera
- Run
cd ~/ros2_ws && colcon build --packages-select arm_demoto enter the ros2 workspace and build the arm_demo package.

- Then run
source ~/ros2_ws/install/setup.bash# Activate workspace

- Finally run
ros2 launch arm_demo camera.launch.py# Run camera.launch.py file (Here the camera uses default video0. To modify, change the default value incamera.launch.pyline 26)
At this point, you will see terminal print information:

And a window appears with real-time footage
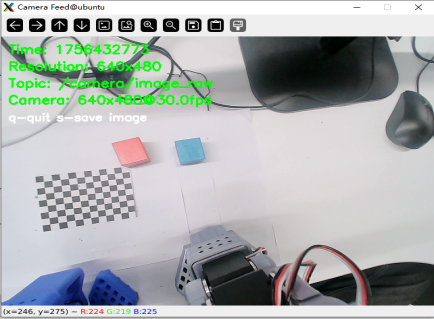
At this step, the camera has been successfully awakened!