04 HUAWEI DevEco Tool Function Introduction
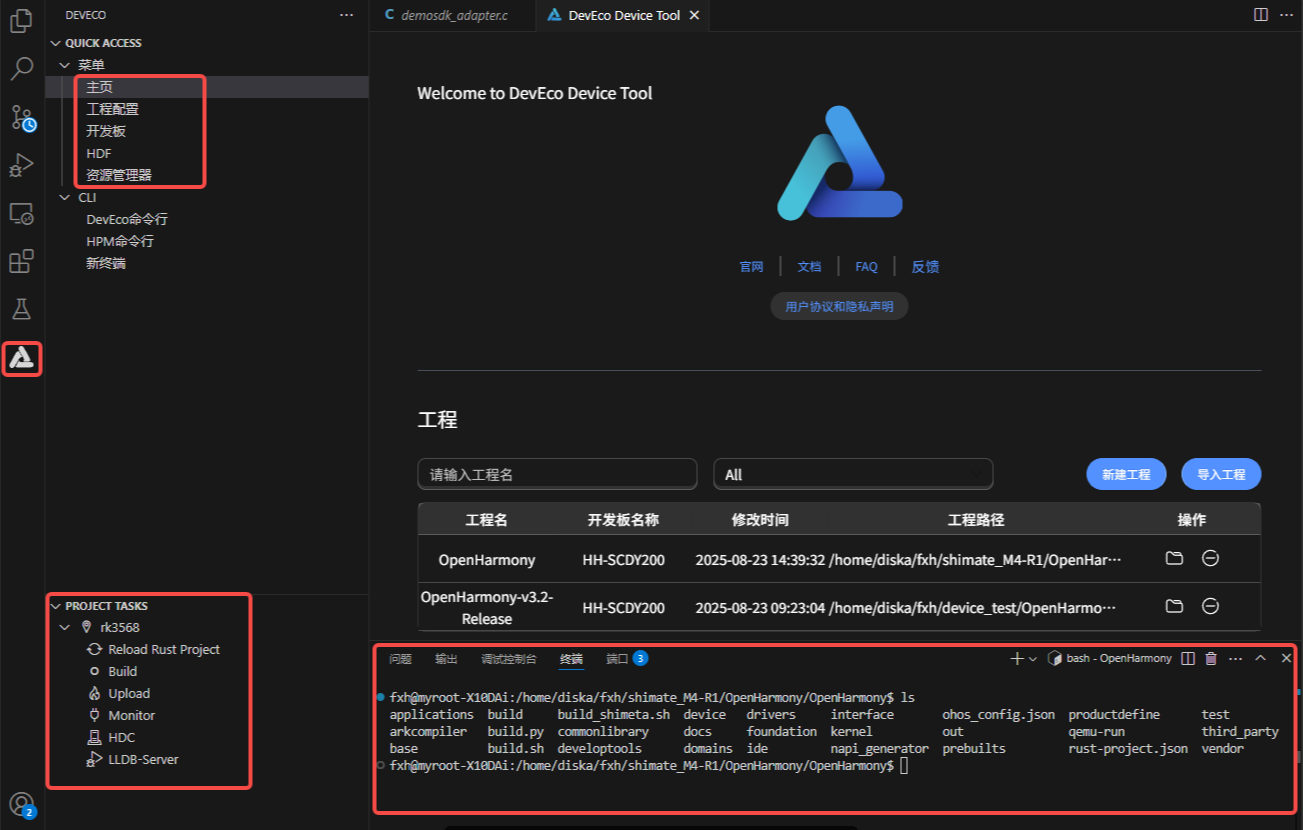
In the menu options of DevEco Device Tool, you can create new products, perform HDF driver management, HCS visual management, and resource management.
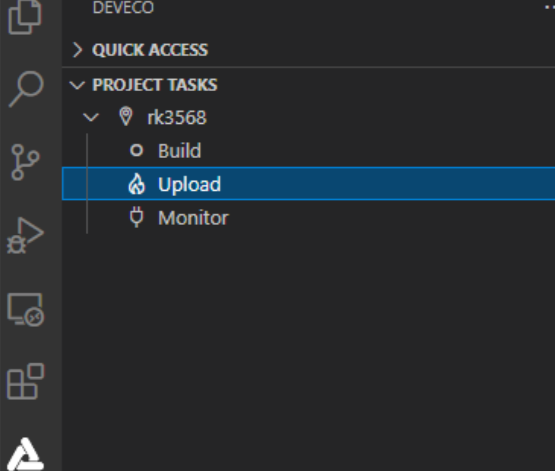
In the PROJECT TASK option at the lower left corner, you can achieve one-click compilation, flashing, and monitoring of code.
Below, we will introduce each function one by one.
1 Menu Bar Introduction
1.1 Project Configuration Option
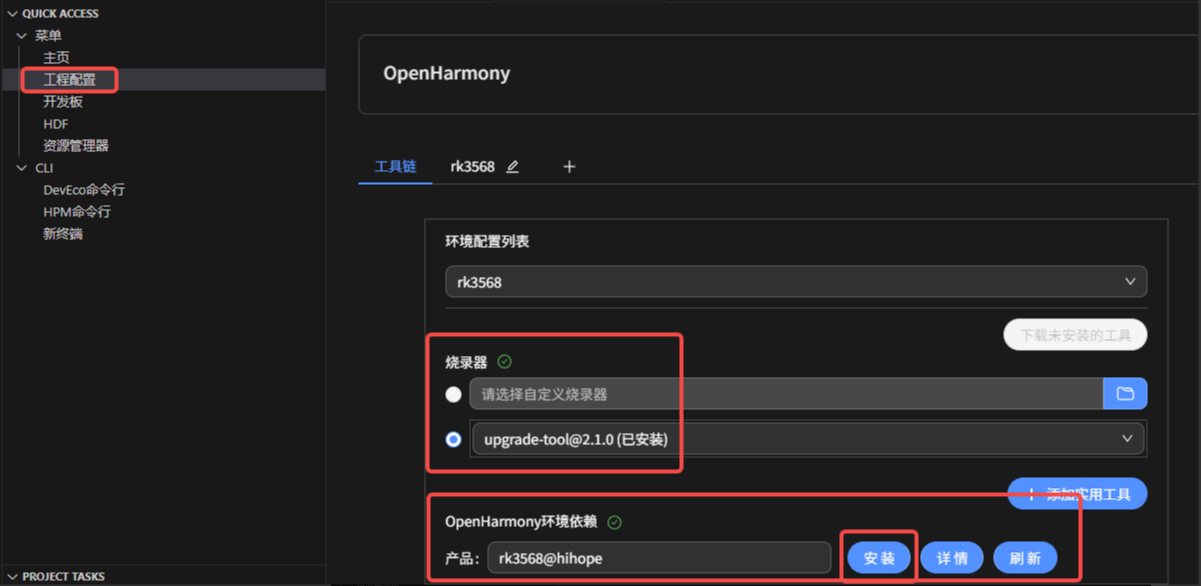
Click Project Configuration. The software will automatically execute scripts to check whether the current development environment tools are complete. If not, directly click "Install" to install all environment dependency tools for you with one click. At this time, pay attention to the terminal, as you may need to enter the administrator password to obtain download permissions.
1.2 Development Board Option
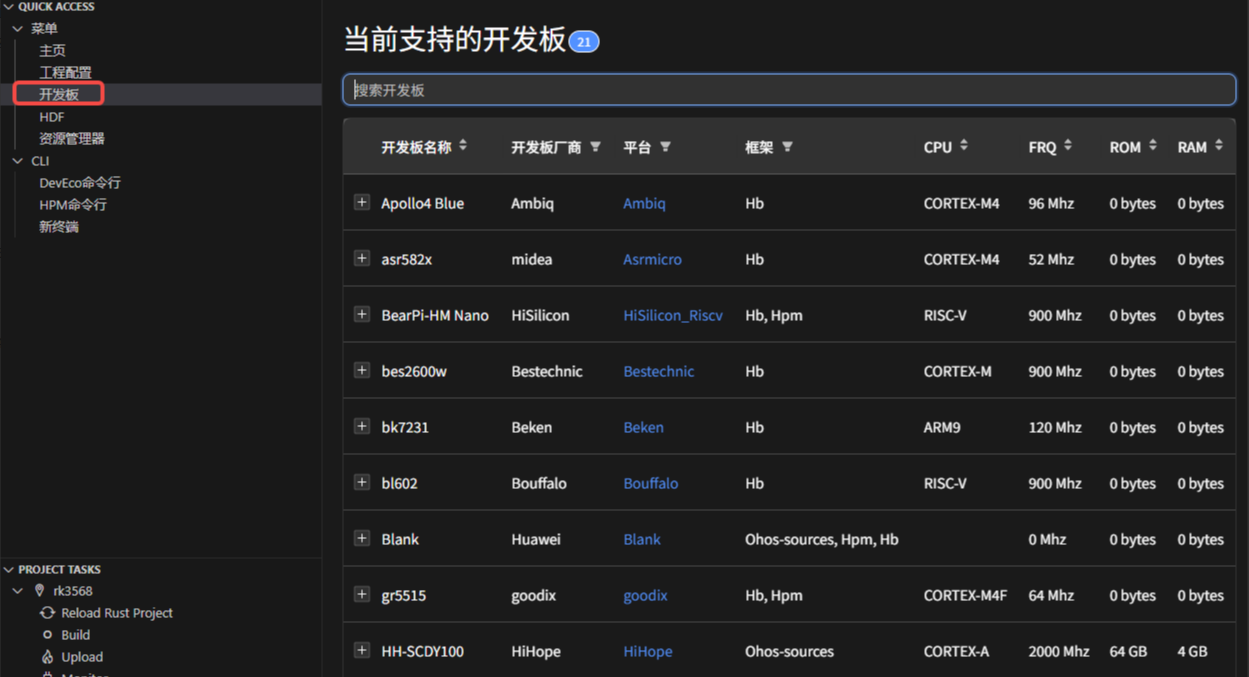
Click the Development Board option. You can see the development boards that the software has adapted to. From small systems to standard systems, there are adapted development boards.
1.3 HDF Option
HDF Driver Framework provides driver framework capabilities for driver developers, including driver loading, driver service management, and driver message mechanisms. It aims to build a unified driver architecture system, providing drivers with a more precise and efficient development environment, striving to achieve one-time development and multi-system deployment.
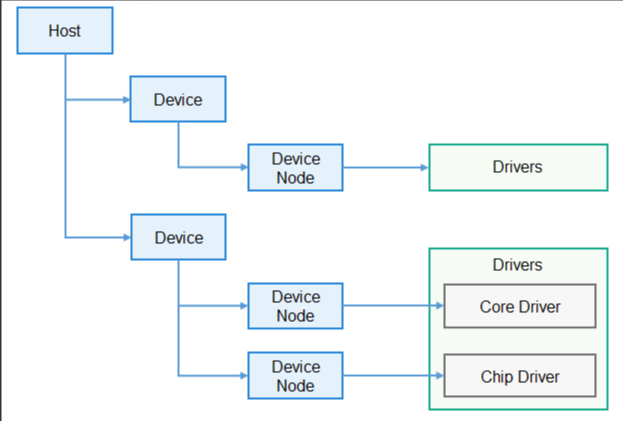
The HDF Driver Framework model is shown in the figure below. The HDF framework uses a componentized driver model as the core design idea to provide developers with more refined driver management, making driver development and deployment more standardized. The HDF framework places one type of device driver in the same host. Developers can also layer driver functions for independent development and deployment, supporting multiple nodes for one driver. For detailed introduction, please refer to the HDF Driver Framework.
Developers can manage and add device drivers through the HDF function of DevEco Device Tool. When adding a driver, the tool will automatically generate corresponding driver directory structure, initialize driver templates, code, header files, and other information.
DevEco Device Tool supports HDF driver templates divided into:
- General Driver Template: A general driver template not specifically for a specific module.
- Specific Driver Template: A driver template provided for Sensor, Audio, Display, and Input modules. Supported products are hispark_taurus_standard, rk3568, hispark_taurus (liteos), hispark_taurus_linux(linux).
DevEco Device Tool's support for HDF in various OpenHarmony versions is as follows:
- OpenHarmony Master branch and 3.2 Beta4 and above branches: Supports adding general and specific driver templates.
- OpenHarmony 3.2 Beta2 and 3.2 Beta3: Not supported for now.
- OpenHarmony 3.0 LTS and 3.1 Release: Supports adding general driver templates.
Prerequisites
- Use a development board that supports HDF functions, such as Hi3516DV300 development board, and obtain the OpenHarmony version source code that supports adding driver templates.
- The OpenHarmony source code has been opened in DevEco Device Tool.
1.4 Resource Management
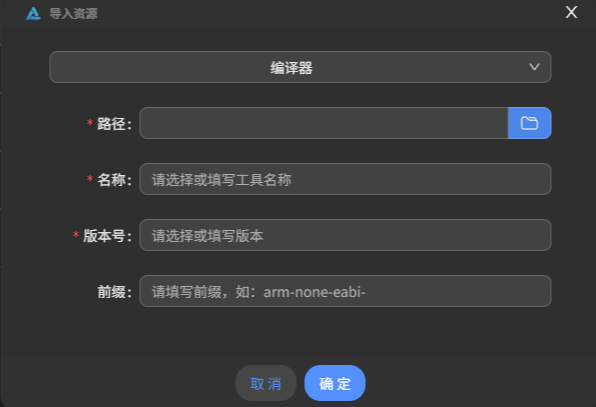
With the expansion of the user base and the increase in chip types, the differences in required tools and source code are gradually increasing. As a development platform, DevEco Device Tool also needs to provide differentiated capabilities for different users. Starting from version 3.1 Release, DevEco Device Tool provides independent resource management capabilities. It can not only flexibly manage device resources and decouple the strong binding relationship between chips and tools/source code, but also enhance the flexibility of DevEco Device Tool through custom capabilities.
During the process of using DevEco Device Tool for source code compilation and flashing, different development boards depend on different resources. Developers can view the installation status of currently required resources in the "Resource Manager" interface and download or import uninstalled resources.

2 Code Editing
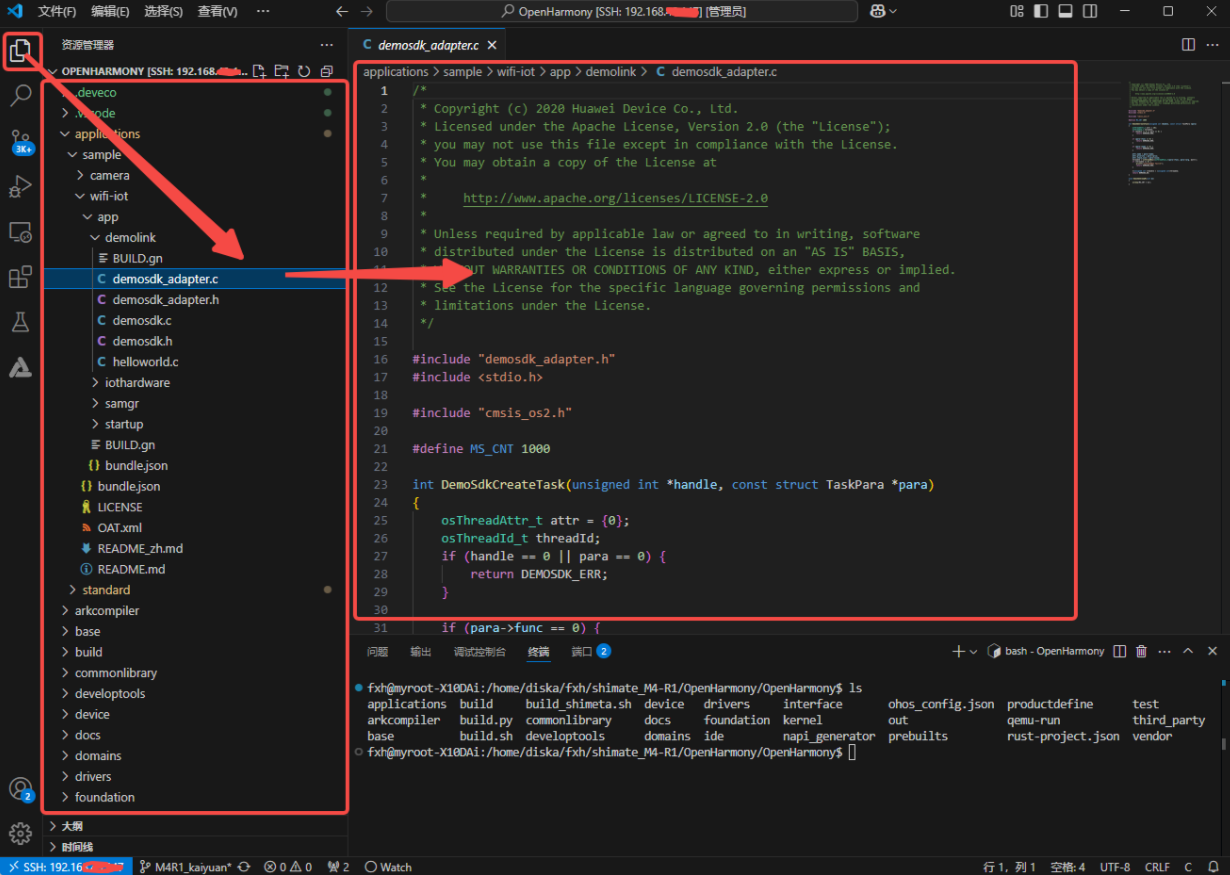
After installing the C/C++ plugin provided by Microsoft, DevEco Device Tool supports C/C++ code editing. Based on the C/C++ plugin, it supports functions such as code search, keyword highlighting, code auto-completion, code input prompts, and code checking.
After remotely connecting to the server, click the folder icon in the upper left corner to view the SDK files in Ubuntu. Select the corresponding file to edit!
3 Compilation Toolbar Introduction
3.1 Compilation
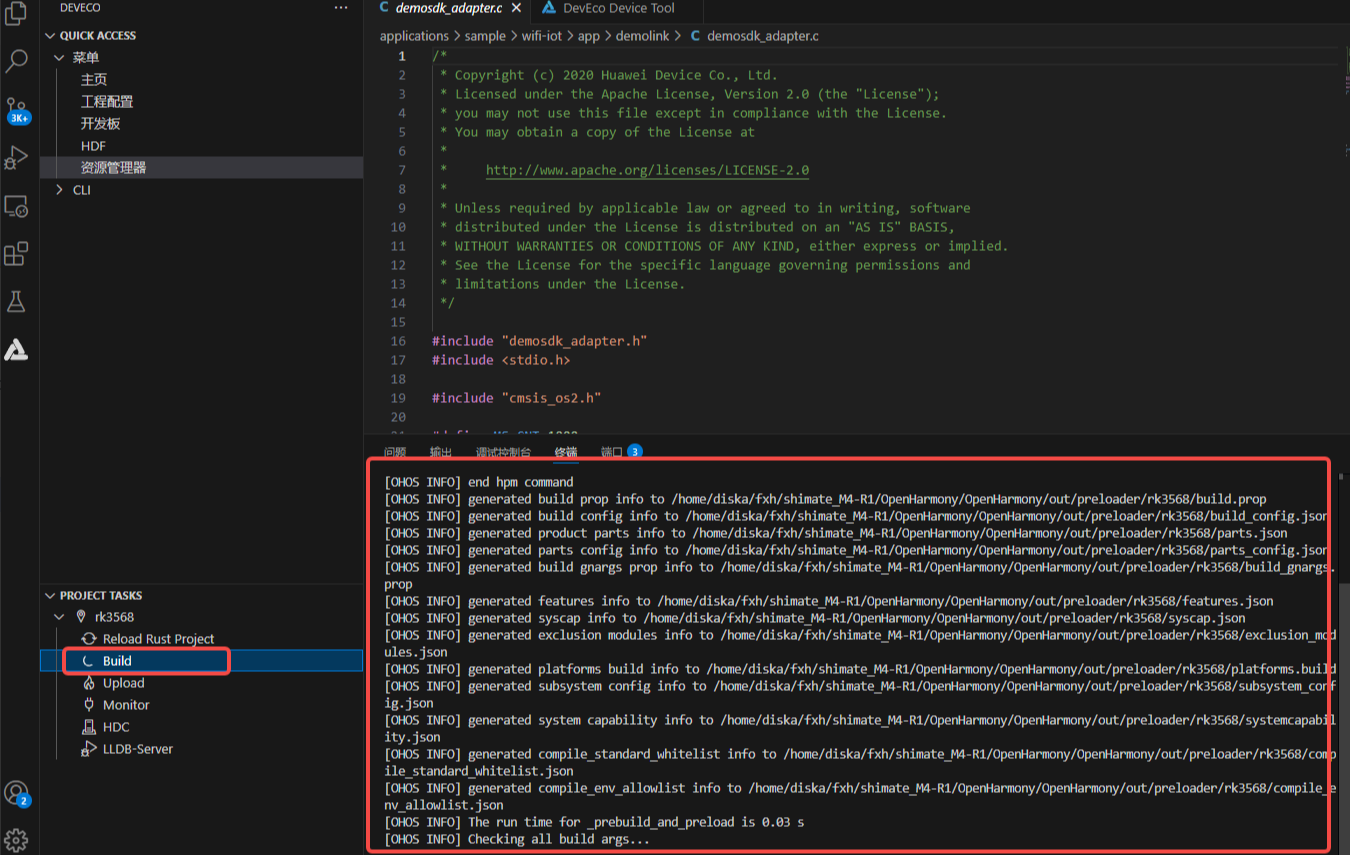
After installing dependencies according to the instructions above, you can compile with one click. Just wait for the compilation to complete. For standard systems, the compilation time will be very long (it may take a few hours on a personal computer).
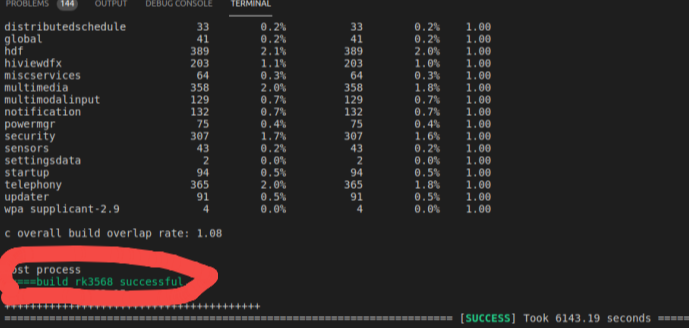
Just wait for the successful compilation prompt.
3.2 Flashing
After compilation is complete, connect the USB OTG interface to the computer's USB. In PROJECT TASKS, click the Upload button under rk3568 to start flashing.
When the screen prompts "Operation paused, Please press Enter key to continue", please press Enter to continue.
Note
If the development board is not in flashing mode, the screen will prompt "The board is not in Loader mode. Please .........". At this time, please hold down the update button of the development board, power on the development board again, and finally release the update button to enter flashing mode. At this time, the script will continue to execute until flashing is complete.
The successful flashing prompt is as follows:

If you have used Rockchip's flashing tool RKDEVTool on Windows before, you will find that the one-click flashing process using DevEco Device Tool takes a long time. This is because the compiled files are in the Ubuntu directory, and the flashing process occurs in the Windows environment. After executing the flashing environment, the image files under Ubuntu must first be pulled to Windows. This process takes a long time!

After executing flashing, the development board will automatically restart and enter the system.