02-Hybrid_vision_toolkit
📋 Introduction
Hybrid_vision_toolkit is a high-performance C++ SDK designed by ShiMetaPi specifically for event cameras (DVS). It supports real-time acquisition and processing of event data streams (EVS) and image data streams (APS), and is compatible with third-party event formats. For example: EventCD, suitable for high-performance event camera development.
📋 Technical Specifications
Event Camera Parameters
- EVS Resolution: 768×608 (Subsampling: 384×304)
- APS Resolution: 768×608 (Adjustable)
- Data Transmission: USB 3.0 high-speed transmission
- Event Format: Compatible with EventCD/EVT2.0, etc.
System Requirements
- C++ Standard: C++17 or higher
- CMake: 3.10 or higher
- Operating System: Ubuntu 22.04
🔧 Dependency Description
- OpenCV: Image processing and visualization (
libopencv-dev) - libusb-1.0: USB device communication (
libusb-1.0-0-dev) - Hybrid Visoin SDK: ShimetaPi API
- Openeb: Third-party dependency library (Optional)
🚀 Quick Start
Build Based on HV Project
# Ubuntu/Debian
sudo apt-get update
sudo apt-get install build-essential cmake libusb-1.0-0-dev libopencv-dev
# Add execution permission to script
chmod +x install_libs.sh
# Install to default location (/usr/local)
./install_libs.sh
# Or install to specified location
./install_libs.sh /path/to/install1.hv_toolkit_get_started
# Enter example program directory
cd sample/hv_toolkit_get_started
# Build example program
mkdir build && cd build
cmake ..
make
# Run example program
./hv_toolkit_get_startedProgram running screenshot 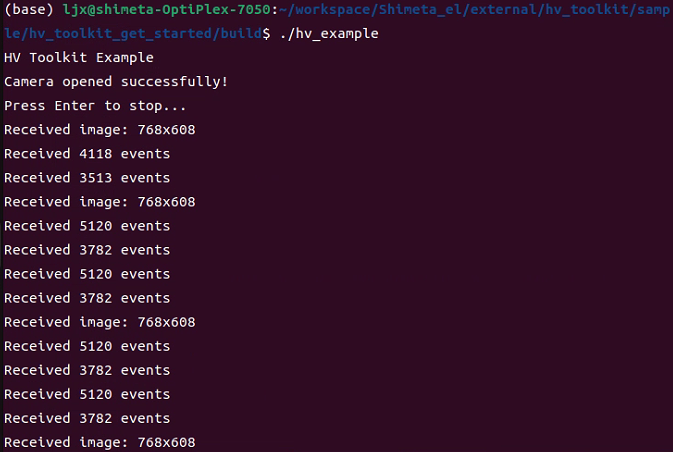
2.hv_camera_record
# Enter example program directory
cd sample/hv_camera_record
# Build example program
mkdir build && cd build
cmake ..
make
# Run example program
./hv_camera_record events.raw video.avi 5Program running screenshot 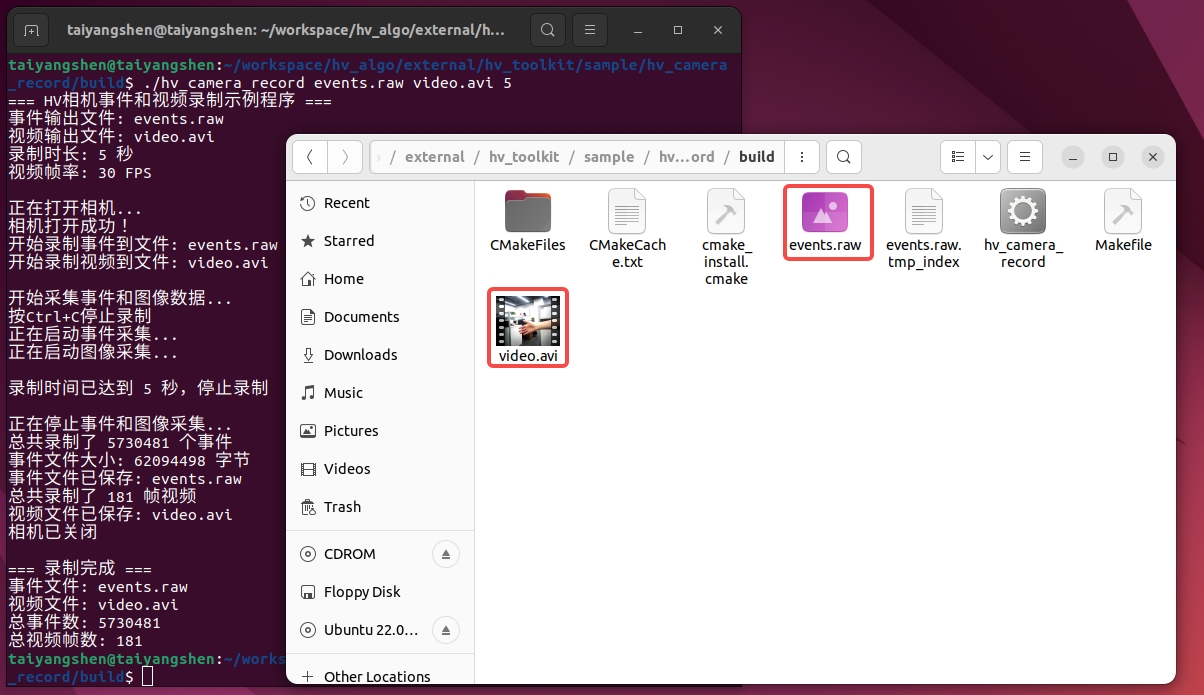
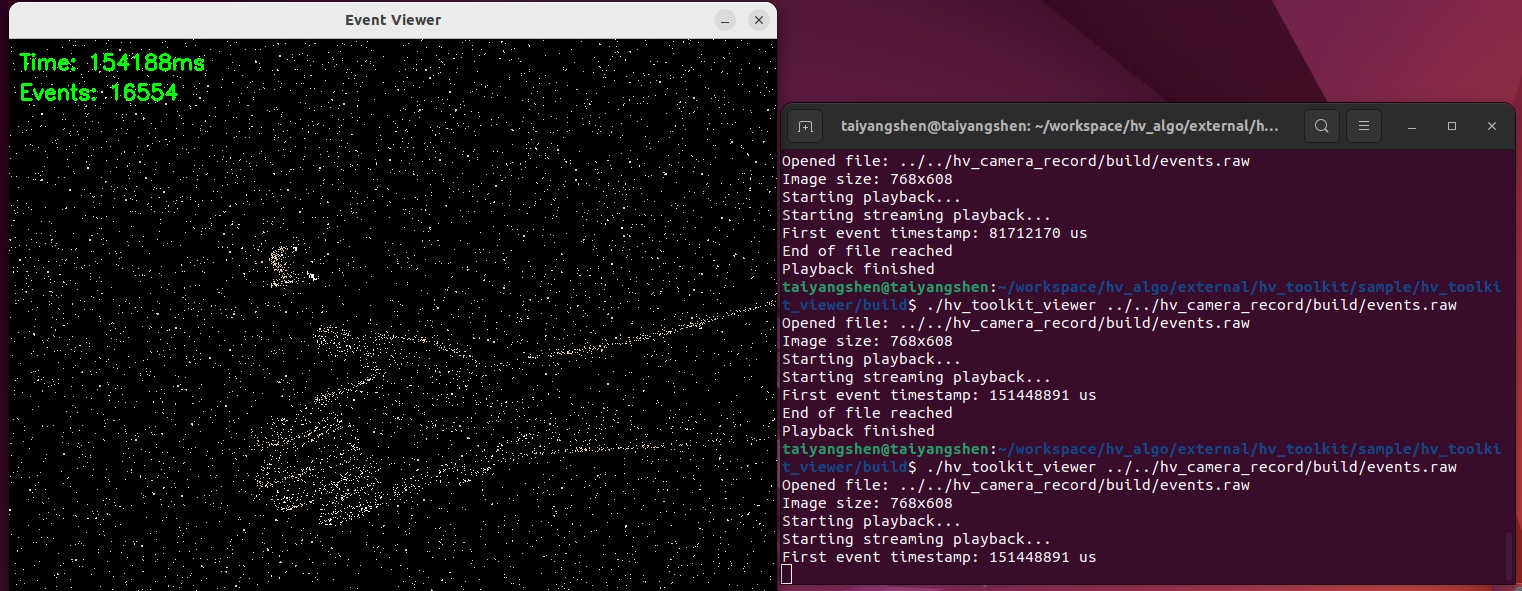
3. hv_toolkit_viewer
# Enter example program directory
cd sample/hv_toolkit_viewer
# Build example program
mkdir build && cd build
cmake ..
make
# Run example program
./hv_toolkit_viewer ../../hv_camera_record/build/events.rawProgram running screenshot