Machine Vision Technology Development
Experiment 2 - Color Recognition Detection
pip install opencv-python # Download open-cv database(Also need to install python3 yourself, can skip if already downloaded)cd OPENCV# Open OPENCV packagesudo python3 ./color_detection.py# Run py file
Terminal displays:

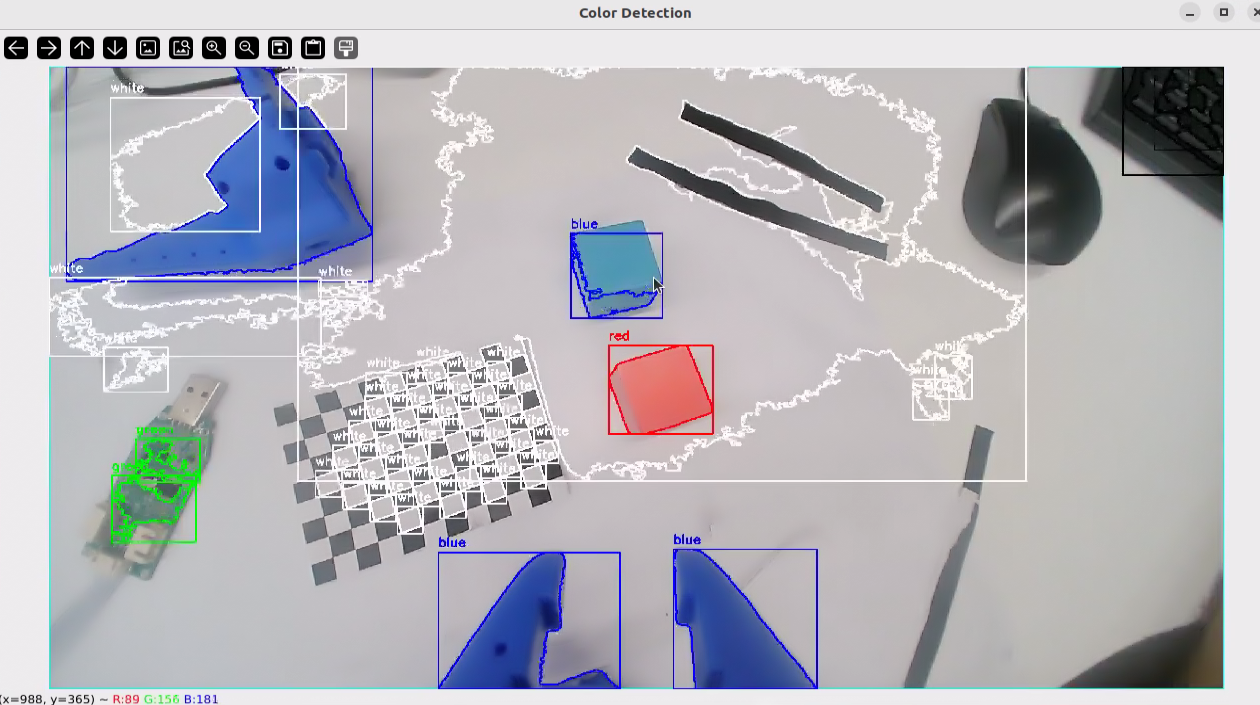
At this time, the Linux system will display the camera's real-time video. We need to test the keys under the window focus, the effect is as follows:
#!/usr/bin/env python
# -*- coding: utf-8 -*-
"""
Multi-color simultaneous recognition program
Function: Real-time recognition of multiple color objects in camera
"""
import cv2
import numpy as np
import sys
import os
import argparse
def main():
"""
Main function: Open camera and perform multi-color simultaneous recognition
"""
# Parse command line arguments
parser = argparse.ArgumentParser(description='Multi-color simultaneous recognition program')
parser.add_argument('--width', type=int, default=2560, help='Display window width')
parser.add_argument('--height', type=int, default=1440, help='Display window height')
args = parser.parse_args()
# Open default camera
cap = cv2.VideoCapture(0)
# Check if camera opened successfully
if not cap.isOpened():
print("Error: Unable to open camera")
sys.exit(1)
# Set camera resolution
cap.set(cv2.CAP_PROP_FRAME_WIDTH, args.width)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, args.height)
# Create windows and set sizes
cv2.namedWindow('Original', cv2.WINDOW_NORMAL)
cv2.namedWindow('Color Detection', cv2.WINDOW_NORMAL)
cv2.namedWindow('Controls', cv2.WINDOW_NORMAL)
# Set window sizes
cv2.resizeWindow('Original', args.width // 2, args.height // 2)
cv2.resizeWindow('Color Detection', args.width // 2, args.height // 2)
cv2.resizeWindow('Controls', 600, 300)
# Create HSV color range sliders
cv2.createTrackbar('H_min', 'Controls', 0, 179, lambda x: None)
cv2.createTrackbar('H_max', 'Controls', 179, 179, lambda x: None)
cv2.createTrackbar('S_min', 'Controls', 0, 255, lambda x: None)
cv2.createTrackbar('S_max', 'Controls', 255, 255, lambda x: None)
cv2.createTrackbar('V_min', 'Controls', 0, 255, lambda x: None)
cv2.createTrackbar('V_max', 'Controls', 255, 255, lambda x: None)
# Define color ranges and corresponding color names and display colors
color_ranges = {
'red': {
'ranges': [(0, 50, 50), (10, 255, 255), (160, 50, 50), (179, 255, 255)], # Red has two ranges
'color': (0, 0, 255) # BGR format: Blue=0, Green=0, Red=255
},
'green': {
'ranges': [(35, 50, 50), (85, 255, 255)],
'color': (0, 255, 0) # BGR format: Blue=0, Green=255, Red=0
},
'blue': {
'ranges': [(100, 50, 50), (130, 255, 255)],
'color': (255, 0, 0) # BGR format: Blue=255, Green=0, Red=0
},
'yellow': {
'ranges': [(20, 100, 100), (30, 255, 255)],
'color': (0, 255, 255) # BGR format: Blue=0, Green=255, Red=255
},
'white': {
'ranges': [(0, 0, 200), (180, 30, 255)],
'color': (255, 255, 255) # BGR format: Blue=255, Green=255, Red=255
},
'black': {
'ranges': [(0, 0, 0), (180, 255, 30)],
'color': (0, 0, 0) # BGR format: Blue=0, Green=0, Red=0
}
}
# Set initial slider positions for custom color
cv2.setTrackbarPos('H_min', 'Controls', 0)
cv2.setTrackbarPos('S_min', 'Controls', 0)
cv2.setTrackbarPos('V_min', 'Controls', 0)
cv2.setTrackbarPos('H_max', 'Controls', 179)
cv2.setTrackbarPos('S_max', 'Controls', 255)
cv2.setTrackbarPos('V_max', 'Controls', 255)
print("Multi-color simultaneous recognition program started")
print("Key instructions:")
print("- 'q': Exit program")
print("- 's': Save current frame and detection results")
print("- '+'/'-': Adjust window size")
# Loop to read camera frames
while True:
# Read a frame
ret, frame = cap.read()
# If failed to read, exit loop
if not ret:
print("Error: Unable to read camera frame")
break
# Convert to HSV color space
hsv = cv2.cvtColor(frame, cv2.COLOR_BGR2HSV)
# Get current slider values (for custom color detection)
h_min = cv2.getTrackbarPos('H_min', 'Controls')
h_max = cv2.getTrackbarPos('H_max', 'Controls')
s_min = cv2.getTrackbarPos('S_min', 'Controls')
s_max = cv2.getTrackbarPos('S_max', 'Controls')
v_min = cv2.getTrackbarPos('V_min', 'Controls')
v_max = cv2.getTrackbarPos('V_max', 'Controls')
# Create custom color mask
custom_lower = np.array([h_min, s_min, v_min])
custom_upper = np.array([h_max, s_max, v_max])
custom_mask = cv2.inRange(hsv, custom_lower, custom_upper)
# Create detection result image
detection_frame = frame.copy()
# Process custom color
contours, _ = cv2.findContours(custom_mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
for contour in contours:
area = cv2.contourArea(contour)
if area < 500: # Ignore too small contours
continue
# Draw contour
cv2.drawContours(detection_frame, [contour], -1, (255, 255, 0), 2) # Cyan
# Calculate bounding rectangle
x, y, w, h = cv2.boundingRect(contour)
# Display "Custom" above rectangle
cv2.putText(detection_frame, "Custom", (x, y - 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.7, (255, 255, 0), 2)
# Draw rectangle
cv2.rectangle(detection_frame, (x, y), (x + w, y + h), (255, 255, 0), 2)
# Detect each predefined color
for color_name, color_info in color_ranges.items():
# Create mask
if color_name == 'red': # Red needs special treatment (two ranges)
lower1 = np.array(color_info['ranges'][0])
upper1 = np.array(color_info['ranges'][1])
lower2 = np.array(color_info['ranges'][2])
upper2 = np.array(color_info['ranges'][3])
mask1 = cv2.inRange(hsv, lower1, upper1)
mask2 = cv2.inRange(hsv, lower2, upper2)
color_mask = cv2.bitwise_or(mask1, mask2)
else:
lower = np.array(color_info['ranges'][0])
upper = np.array(color_info['ranges'][1])
color_mask = cv2.inRange(hsv, lower, upper)
# Find contours
contours, _ = cv2.findContours(color_mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# Process contours
for contour in contours:
area = cv2.contourArea(contour)
if area < 500: # Ignore too small contours
continue
# Draw contour
cv2.drawContours(detection_frame, [contour], -1, color_info['color'], 2)
# Calculate bounding rectangle
x, y, w, h = cv2.boundingRect(contour)
# Display color name above rectangle
cv2.putText(detection_frame, color_name, (x, y - 10),
cv2.FONT_HERSHEY_SIMPLEX, 0.7, color_info['color'], 2)
# Draw rectangle
cv2.rectangle(detection_frame, (x, y), (x + w, y + h), color_info['color'], 2)
# Display images
cv2.imshow('Original', frame)
cv2.imshow('Color Detection', detection_frame)
# Wait for key press
key = cv2.waitKey(30) & 0xFF
# Handle key press
if key == ord('q'):
print("User exited program")
break
elif key == ord('s'):
# Create save directory
save_dir = "color_detection_images"
if not os.path.exists(save_dir):
os.makedirs(save_dir)
# Generate file names
import time
timestamp = time.strftime("%Y%m%d_%H%M%S")
original_filename = os.path.join(save_dir, f"original_{timestamp}.jpg")
detection_filename = os.path.join(save_dir, f"detection_{timestamp}.jpg")
# Save images
cv2.imwrite(original_filename, frame)
cv2.imwrite(detection_filename, detection_frame)
print(f"Saved images: {original_filename}, {detection_filename}")
elif key == ord('+') or key == ord('='): # '=' and '+' are usually on the same key
# Increase window size
current_width = cv2.getWindowImageRect('Color Detection')[2]
current_height = cv2.getWindowImageRect('Color Detection')[3]
new_width = int(current_width * 1.1)
new_height = int(current_height * 1.1)
cv2.resizeWindow('Original', new_width, new_height)
cv2.resizeWindow('Color Detection', new_width, new_height)
print(f"Window size increased to: {new_width}x{new_height}")
elif key == ord('-'):
# Decrease window size
current_width = cv2.getWindowImageRect('Color Detection')[2]
current_height = cv2.getWindowImageRect('Color Detection')[3]
new_width = int(current_width * 0.9)
new_height = int(current_height * 0.9)
cv2.resizeWindow('Original', new_width, new_height)
cv2.resizeWindow('Color Detection', new_width, new_height)
print(f"Window size decreased to: {new_width}x{new_height}")
# Release resources
cap.release()
cv2.destroyAllWindows()
print("Program exited")
if __name__ == "__main__":
try:
main()
except Exception as e:
print(f"Program error: {e}")
sys.exit(1)