07 I2C Communication
1 I2C Introduction
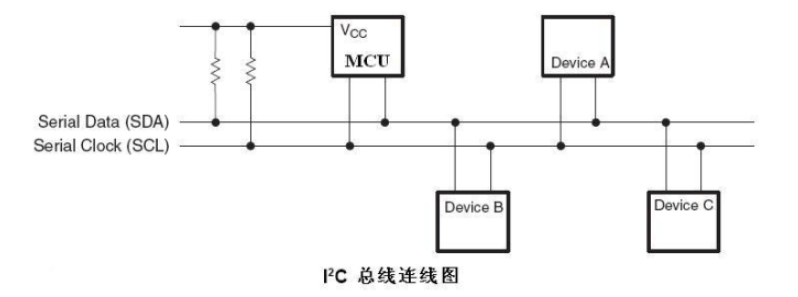
I2C bus controller transmits information between devices connected to the bus via the Serial Data (SDA) line and Serial Clock (SCL) line. Each device has a unique address (whether it is a microcontroller (MCU), LCD driver, memory, or keyboard interface), and can act as a transmitter or receiver (depending on the device's function).
1 For a detailed introduction to I2C, please refer to:
For a detailed introduction to I2C, please refer to:
&i2c3{
status = "okay";
};&i2c5{
status = "okay";
};In registering I2C devices, an i2c_client structure is required to describe the I2C device. However, in standard Linux, the user only needs to provide the corresponding I2C device information, and Linux will construct the i2c_client structure based on the information provided.
In the SDK we provide, the I2C3 and I2C5 interfaces have already been enabled (these two interfaces are enabled by default) in arch/arm64/boot/dts/rockchip/rk3568-toybrick-x0-linux.dts:
The user-provided I2C device information is written into the DTS file as a node, as shown below:
&i2c3{
nca9555:nca9555@20{
reg=<0x20>;
compatible = "novosense,nca9555";
status="okay";
gpio-controller;
#gpio-cells = <2>;
};
};Driver mounts devices by obtaining node information from the DTS. Among these, NCA9555 has already been mounted on I2C3, which is a 24-pin CMOS device providing 16-bit general-purpose parallel I/O expansion via the I2C bus.
3.1 I2C Device Tree Configuration
Below, based on the device tree chapter, we analyze the device tree configuration of I2C3 and I2C5.
Next, according to the device tree chapter, we will analyze the I2C3 and I2C5 device tree configurations.
Tips
The following file path: out/kernel/src_tmp/linux-5.10/arch/arm64/boot/dts/rockchip/ must be built from source code first.
We first locate the basic configuration content for I2C3 and I2C5 in rk3568.dtsi as follows:
i2c3: i2c@fe5c0000 {
compatible = "rockchip,rk3399-i2c";
reg = <0x0 0xfe5c0000 0x0 0x1000>; // register address
clocks = <&cru CLK_I2C3>, <&cru PCLK_I2C3>; // clock configuration
clock-names = "i2c", "pclk";
interrupts = <GIC_SPI 49 IRQ_TYPE_LEVEL_HIGH>; // interrupt configuration
pinctrl-names = "default";
pinctrl-0 = <&i2c3m0_xfer>; // pin multiplexing configuration
#address-cells = <1>;
#size-cells = <0>;
status = "disabled"; // default disabled
};
i2c5: i2c@fe5e0000 {
compatible = "rockchip,rk3399-i2c";
reg = <0x0 0xfe5e0000 0x0 0x1000>; // register address
clocks = <&cru CLK_I2C5>, <&cru PCLK_I2C5>; // clock configuration
clock-names = "i2c", "pclk";
interrupts = <GIC_SPI 51 IRQ_TYPE_LEVEL_HIGH>; // interrupt configuration
pinctrl-names = "default";
pinctrl-0 = <&i2c5m0_xfer>; // pin multiplexing configuration
#address-cells = <1>;
#size-cells = <0>;
status = "disabled"; // default disabled
};3.2 I2C Pin Configuration
Next, view the I2C pin configuration in rk3568-pinctrl.dtsi:
i2c3m0_xfer: i2c3m0-xfer {
rockchip,pins =
/* i2c3_sclm0 - clock line */
<1 RK_PA1 1 &pcfg_pull_none_smt>,
/* i2c3_sdam0 - data line */
<1 RK_PA0 1 &pcfg_pull_none_smt>;
};i2c5m0_xfer: i2c5m0-xfer {
rockchip,pins =
/* i2c5_sclm0 - clock line */
<3 RK_PB3 4 &pcfg_pull_none_smt>,
/* i2c5_sdam0 - data line */
<3 RK_PB4 4 &pcfg_pull_none_smt>;
};3.3 Board-Level peripheral configurations
Finally, locate the board-level configuration file to view the I2C peripherals' specific configurations
In rk3568-toybrick.dtsi, I2C5 is enabled and configured with sensors:
&i2c5 {
status = "okay";
gs_mxc6655xa: gs_mxc6655xa@15 {
status = "okay";
compatible = "gs_mxc6655xa";
pinctrl-names = "default";
pinctrl-0 = <&mxc6655xa_irq_gpio>;
reg = <0x15>;
irq-gpio = <&gpio3 RK_PC1 IRQ_TYPE_LEVEL_LOW>;
irq_enable = <0>;
poll_delay_ms = <30>;
type = <SENSOR_TYPE_ACCEL>;
power-off-in-suspend = <1>;
layout = <1>;
};
hym8563: hym8563@51 {
compatible = "haoyu,hym8563";
reg = <0x51>;
pinctrl-names = "default";
pinctrl-0 = <&rtc_int>;
interrupt-parent = <&gpio0>;
interrupts = <RK_PD3 IRQ_TYPE_LEVEL_LOW>;
irq_enable = <0>;
};
};Info
MXC6655XA is a digital-output three-axis accelerometer from MEMSIC (MeiXin Semiconductor).
hym8563 is an I2C-based real-time clock (RTC) chip; the development board actually enables this device.
3.2 Operating I2C common instructions
Check I2C devices:
ls /dev/i2c*Test I2C commands:
The I2C tool is an open-source utility; our SDK has been downloaded and cross-compiled. After compilation, the board generates commands such as i2cdetect, i2cdump, i2cset, i2cget); these can be used directly from the command line:
- i2cdetect – lists I2C buses and all devices on them
- i2cdump – displays all registers of an I2C device
- i2cget – reads a register value from an I2C device
- i2cset – writes a value to a register on an I2C device
3.3 Demonstrations
Following are common usage examples for the above commands:
1. Detect how many I2C buses are present in the current system:
i2cdetect -l
2. View devices on the i2c-3 interface:
i2cdetect -a 3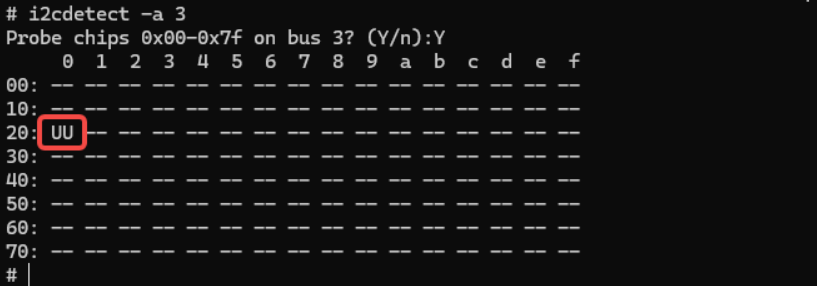
UU indicates that the device at address 0x20 has a driver loaded successfully, i.e., the NCA9555 mounted on I2C3 mentioned above.
3. Read all registers of the selected device:
i2cdump -f -y 3 0x20(Shows values of all registers from 0x00 to 0xff on the device at address 0x20 on I2C3)
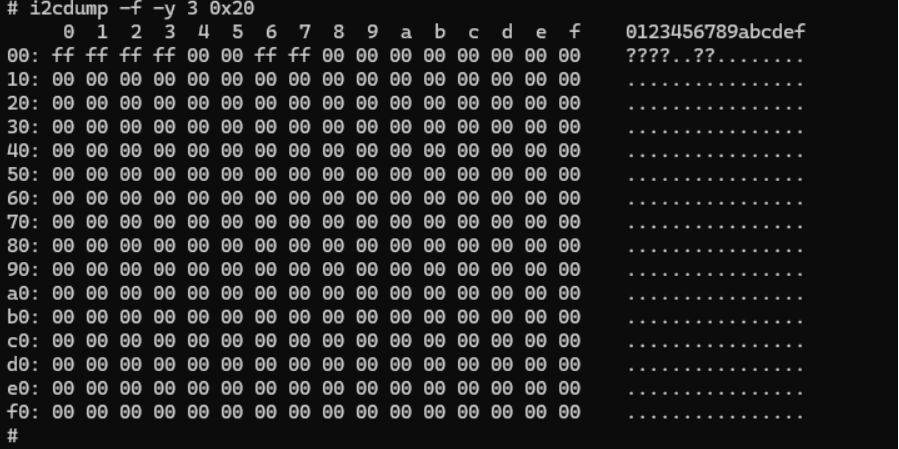
The command executes successfully and outputs data, indicating a device at 0x20 exists on bus 3 and basic communication is working.
4. Read a specific register of a given I2C device:
i2cget -f -y 3 0x20 0x01(Read the value of register 0x01 in the device at address 0x20)

4. I2C Usage — NAPI Method
Info
MXC6655XA is a digital-output three-axis accelerometer hym8563 is an I2C RTC chip; the development board enables only this device
4.1 Kernel Permissions
We run the following command in the terminal to grant permissions for I2C3:
chmod 777 /dev/i2c-34.2 Test Program Explanation
To visually observe the data, we use a logic analyzer to capture the transmitted I2C signals and verify the correctness of the data.
After granting permissions, open the I2C device; after a successful open, click Start to send "Shimeta Pi".
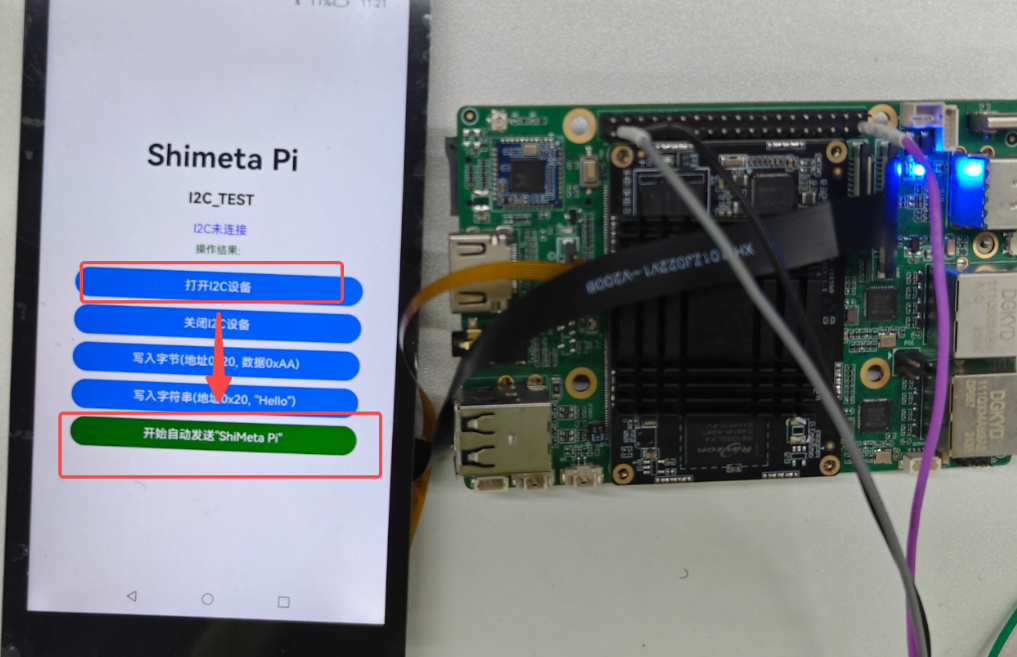
After clicking, I2C3 will send the string "Shimeta Pi" every 100 ms.
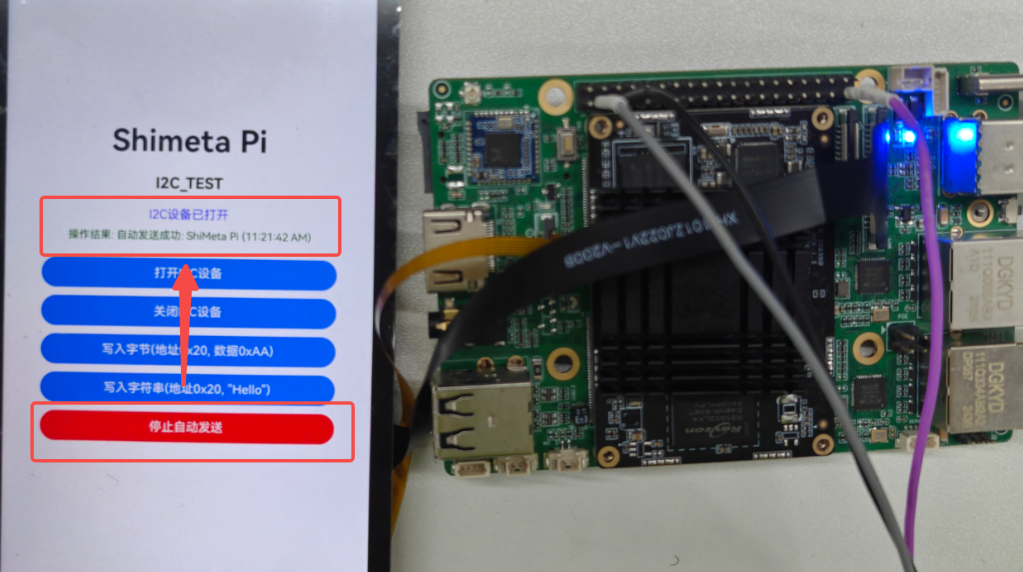
Enabling auto-send, we use a logic analyzer to capture data; the data in 1 second is as follows:

We can see the data being sent every 100 ms as shown above.
We take the last two data as an example for viewing:

The last two data packets are 0x50 and 0x69, corresponding to decimal 80 and 105. See the ASCII table:
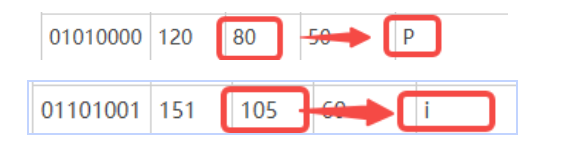
These are exactly the last two data bytes of the string "ShiMeta Pi".
Similarly, the data are arranged as shown in the table below:
| Character | Hex Value | Decimal Value | Description |
|---|---|---|---|
| 'S' | 0x53 | 83 | Character S |
| 'h' | 0x68 | 104 | Character h |
| 'i' | 0x69 | 105 | Character i |
| 'M' | 0x4D | 77 | Character M |
| 'e' | 0x65 | 101 | Character e |
| 't' | 0x74 | 116 | Character t |
| 'a' | 0x61 | 97 | Character a |
| ' ' | 0x20 | 32 | Space |
| 'P' | 0x50 | 80 | Character P |
| 'i' | 0x69 | 105 | Character i |
The values observed on the logic analyzer match the above data exactly.

4.3 Partial Code Explanation
Here we use reading system nodes to operate the I2C peripheral for read/write operations; only portions of the code are shown for illustration.
First, we introduce the ioctl function, a very important control operation function in the embedded field; think of it as a universal remote that presses the appropriate button on a device to trigger the corresponding operation.
The function prototype is:
int ioctl(int fd, unsigned long request, ...);Parameter description:
fd is the file descriptor for the device file; request is the request code. For example, after pressing a remote, the remote may transmit an infrared code; the device decodes it. If the decoded value is "0x9E", the device may perform a corresponding action. Similarly, the kernel defines several I2C operations; we simply send the corresponding request code and the kernel will perform the appropriate operation.
... are variadic parameters; different data is sent with different request codes, such as an AC command code "0x88" indicating temperature setting, which means the data could be the temperature data.
Next, the most important function in our program: ioctl(i2c_fd, I2C_RDWR, &i2c_data). It tells the Linux kernel: the I2C controller corresponding to i2c_fd should perform an I2C read/write operation, and the specific data is &i2c_data.
We also look at the kernel's i2c-dev.h file, placed in the same directory as napi_init.cpp, with code as follows:
/*
i2c-dev.h - i2c-bus driver, char device interface
Copyright (C) 1995-97 Simon G. Vogl
Copyright (C) 1998-99 Frodo Looijaard <frodol@dds.nl>
This program is free software; you can redistribute it and/or modify
it under the terms of the GNU General Public License as published by
the Free Software Foundation; either version 2 of the License, or
(at your option) any later version.
This program is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
GNU General Public License for more details.
You should have received a copy of the GNU General Public License
along with this program; if not, write to the Free Software
Foundation, Inc., 675 Mass Ave, Cambridge, MA 02139, USA.
*/
#ifndef _LINUX_I2C_DEV_H
#define _LINUX_I2C_DEV_H
#include <linux/types.h>
#include <linux/compiler.h>
/* /dev/i2c-X ioctl commands. The ioctl's parameter is always an
* unsigned long, except for:
* - I2C_FUNCS, takes pointer to an unsigned long
* - I2C_RDWR, takes pointer to struct i2c_rdwr_ioctl_data
* - I2C_SMBUS, takes pointer to struct i2c_smbus_ioctl_data
*/
#define I2C_RETRIES 0x0701 /* number of times a device address should
be polled when not acknowledging */
#define I2C_TIMEOUT 0x0702 /* set timeout in units of 10 ms */
/* NOTE: Slave address is 7 or 10 bits, but 10-bit addresses
* are NOT supported! (due to code brokenness)
*/
#define I2C_SLAVE 0x0703 /* Use this slave address */
#define I2C_SLAVE_FORCE 0x0706 /* Use this slave address, even if it
is already in use by a driver! */
#define I2C_TENBIT 0x0704 /* 0 for 7 bit addrs, != 0 for 10 bit */
#define I2C_FUNCS 0x0705 /* Get the adapter functionality mask */
#define I2C_RDWR 0x0707 /* Combined R/W transfer (one STOP only) */
#define I2C_PEC 0x0708 /* != 0 to use PEC with SMBus */
#define I2C_SMBUS 0x0720 /* SMBus transfer */
/* This is the structure as used in the I2C_SMBUS ioctl call */
struct i2c_smbus_ioctl_data {
__u8 read_write;
__u8 command;
__u32 size;
union i2c_smbus_data __user *data;
};
/* This is the structure as used in the I2C_RDWR ioctl call */
struct i2c_rdwr_ioctl_data {
struct i2c_msg __user *msgs; /* pointers to i2c_msgs */
__u32 nmsgs; /* number of i2c_msgs */
};
#define I2C_RDRW_IOCTL_MAX_MSGS 42
#ifdef __KERNEL__
#define I2C_MAJOR 89 /* Device major number */
#endif
#endif /* _LINUX_I2C_DEV_H */We can find that mainly there are some macro definitions, defining the operations to be executed when receiving corresponding request codes.
#define I2C_RDWR 0x0707 /* Combined R/W transfer (one STOP only) *//* This is the structure as used in the I2C_RDWR ioctl call */
struct i2c_rdwr_ioctl_data {
struct i2c_msg __user *msgs; /* pointers to i2c_msgs */
__u32 nmsgs; /* number of i2c_msgs */
};We take I2C_RDWR as used in this project as an example (code above). Its function is to perform a complex, combined I2C message transfer. The parameter is a pointer to an i2c_rdwr_ioctl_data. The implementation creates an array of i2c_msg containing read/write operations and combined read/write operations; during the process, only one STOP signal that conforms to the I2C standard is produced.
Now let's look at the NAPI function for sending I2C data:
// I2C write a byte
// Parameter: offset (register offset), data (the byte to write)
// Return: 0 on success, -1 on failure
static napi_value I2cWriteByte(napi_env env, napi_callback_info info)
{
size_t argc = 2;
napi_value args[2] = {nullptr};
napi_value result;
napi_get_cb_info(env, info, &argc, args, nullptr, nullptr);
if (argc < 2) {
napi_create_int32(env, -1, &result); // Parameter error returns -1
return result;
}
if (!i2c_opened || i2c_fd < 0) {
napi_create_int32(env, -1, &result); // Device not opened returns -1
return result;
}
int32_t offset, data;
napi_get_value_int32(env, args[0], &offset);
napi_get_value_int32(env, args[1], &data);
// Use ioctl to directly operate I2C device
struct i2c_rdwr_ioctl_data i2c_data;
struct i2c_msg msg;
unsigned char buf[2];
buf[0] = (unsigned char)offset; // Register address
buf[1] = (unsigned char)data; // Data to write
msg.addr = I2C_SLAVE_ADDR; // I2C device address
msg.flags = 0; // Write operation
msg.len = 2; // Data length
msg.buf = buf; // Data buffer
i2c_data.msgs = &msg;
i2c_data.nmsgs = 1;
int ret = ioctl(i2c_fd, I2C_RDWR, &i2c_data);
if (ret < 0) {
OH_LOG_Print(LOG_APP, LOG_ERROR, GLOBAL_RESMGR, I2C_TAG,
"I2C write byte failed: %{public}s", strerror(errno));
napi_create_int32(env, -1, &result); // Write failed returns -1
return result;
}
OH_LOG_Print(LOG_APP, LOG_INFO, GLOBAL_RESMGR, I2C_TAG,
"I2C write byte success: addr=0x%{public}02X, offset=0x%{public}02X, data=0x%{public}02X",
I2C_SLAVE_ADDR, offset, data);
napi_create_int32(env, 0, &result); // Success returns 0
return result;
}We first look at the function I2cWriteByte; the process is as follows:
- Use
napi_get_cb_infoandnapi_get_value_int32to obtain the offset and data passed from JavaScript - Then write the two data bytes into the
i2c_dataarray - Use
ioctlto inform the kernel to perform anI2C_RDWRoperation; the data isi2c_data - The lower layers will automatically generate the corresponding I2C start condition, send the two data bytes, and then generate a stop signal to complete the I2C transmission
// I2C write a string
// Parameters: offset (register offset), data (the string to write)
// Return: 0 on success, -1 on failure
static napi_value I2cWriteString(napi_env env, napi_callback_info info)
{
size_t argc = 2;
napi_value args[2] = {nullptr};
napi_value result;
napi_get_cb_info(env, info, &argc, args, nullptr, nullptr);
if (argc < 2) {
napi_create_int32(env, -1, &result); // Parameter error returns -1
return result;
}
if (!i2c_opened || i2c_fd < 0) {
napi_create_int32(env, -1, &result); // Device not opened returns -1
return result;
}
int32_t offset;
napi_get_value_int32(env, args[0], &offset);
size_t str_length;
napi_get_value_string_utf8(env, args[1], nullptr, 0, &str_length);
if (str_length == 0 || str_length > 256) {
napi_create_int32(env, -1, &result); // Invalid string length returns -1
return result;
}
char* str_buffer = new char[str_length + 1];
napi_get_value_string_utf8(env, args[1], str_buffer, str_length + 1, &str_length);
// Use ioctl to directly operate I2C device, write byte by byte
struct i2c_rdwr_ioctl_data i2c_data;
struct i2c_msg msg;
unsigned char buf[2];
int success_count = 0;
for (size_t i = 0; i < str_length; i++) {
buf[0] = (unsigned char)(offset + i); // Register address
buf[1] = (unsigned char)str_buffer[i]; // Data to write
msg.addr = I2C_SLAVE_ADDR; // I2C device address
msg.flags = 0; // Write operation
msg.len = 2; // Data length
msg.buf = buf; // Data buffer
i2c_data.msgs = &msg;
i2c_data.nmsgs = 1;
int ret = ioctl(i2c_fd, I2C_RDWR, &i2c_data);
if (ret < 0) {
OH_LOG_Print(LOG_APP, LOG_ERROR, GLOBAL_RESMGR, I2C_TAG,
"I2C write string failed at byte %{public}zu: %{public}s", i, strerror(errno));
break;
}
success_count++;
}
delete[] str_buffer;
if (success_count == (int)str_length) {
OH_LOG_Print(LOG_APP, LOG_INFO, GLOBAL_RESMGR, I2C_TAG,
"I2C write string success: addr=0x%{public}02X, offset=0x%{public}02X, length=%{public}d",
I2C_SLAVE_ADDR, offset, success_count);
napi_create_int32(env, 0, &result); // Success returns 0
} else {
OH_LOG_Print(LOG_APP, LOG_WARN, GLOBAL_RESMGR, I2C_TAG,
"I2C write string partial success: %{public}d/%{public}zu bytes written", success_count, str_length);
napi_create_int32(env, -1, &result); // Partial failure returns -1
}
return result;
}The function for writing I2C strings is simple - after obtaining the string length, execute character transfer the corresponding number of times. No further explanation is needed here.